














ROBOTICS & AUTOMATION
Summit Designer
Market-ready PCB designs created by experts. Reduce time-to-market while saving development time, manpower and cost.
Summit Designer is an open-source application library that delivers standard market-ready PCB designs for our Summit Series drives. Develop applications effortlessly, with minimal changes and seamless integration with Novanta’s drives.
As easy as it gets.
5 simple steps to reduce time to market, save cost and effort.
STEP 1
Have an idea for a new motion control application?

STEP 2
Search our catalog of PCB designs and select one that fits your needs.
STEP 3
Customize it with the help of our application guide.

STEP 4
Have questions? Talk to our experts and get support.

STEP 5
Plug n’ play your Summit Drive and go to market.
Capitan & Everest S user“Summit Designer allowed our company to reduce time-to-market drastically. Their work ethic is remarkable and it enabled our company to save significant time and money.”
Latest designs by experts
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor didunt ut labore et dolore magna aliqua. Ut enim ad minim.
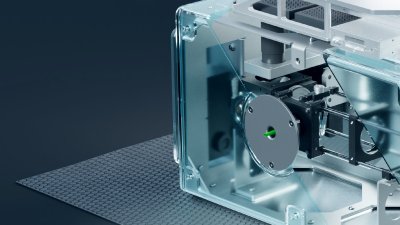
XCR General-Purpose Interface Board
XCR is an ultra-compact interface board offering interface and connectivity for almost all the features embedded in either Capitan NET or Everest S NET. Despite of its small size it’s rated to the full power of the Everest S, and gets the drive ready-to-use by including the required electronics for EtherCAT and CANopen communications, IOs, all compatible feedbacks, and many others.
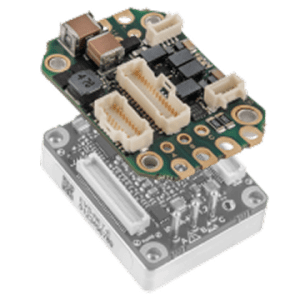
FOR
EVEREST, EVEREST S & CAPITAN (NET)
- Ultra-small footprint
- 72 VDC, 45 A continuous
- EtherCAT & CANopen ready
- Halls, Quadrature encoder, SSI and Dual BiSS-C encoders
- Electromechanical brake dedicated output
- STO dedicated redundant inputs (SIL3 Ple certifiable)
- 4x Digital outputs, 4x Digital inputs, and 1x differential analog input
- Smart & industrial servomotors
- Mobile robots
- Robot joints
- Robotic exoskeletons
29 mm x 42 mm x 11.35 mm
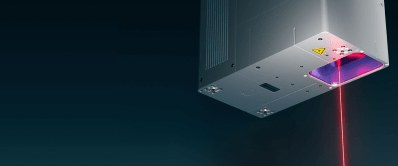
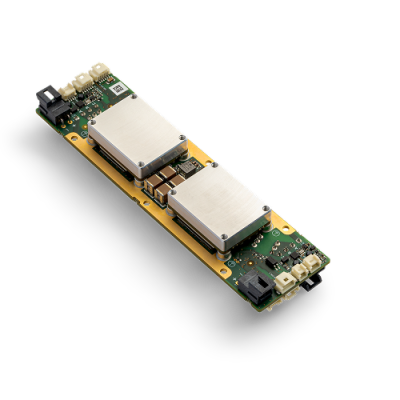
Dual Axis Carrier Board for Robot Links
Dual axis interface board for Capitan NET. Its main purpose is to move the drive from the joints, the densest elements in a collaborative robot, to the robot links, a component typically underutilized. With this, the integration complexity of the robot could be reduced while keeping the advantages of Capitan NET as a motion controller.
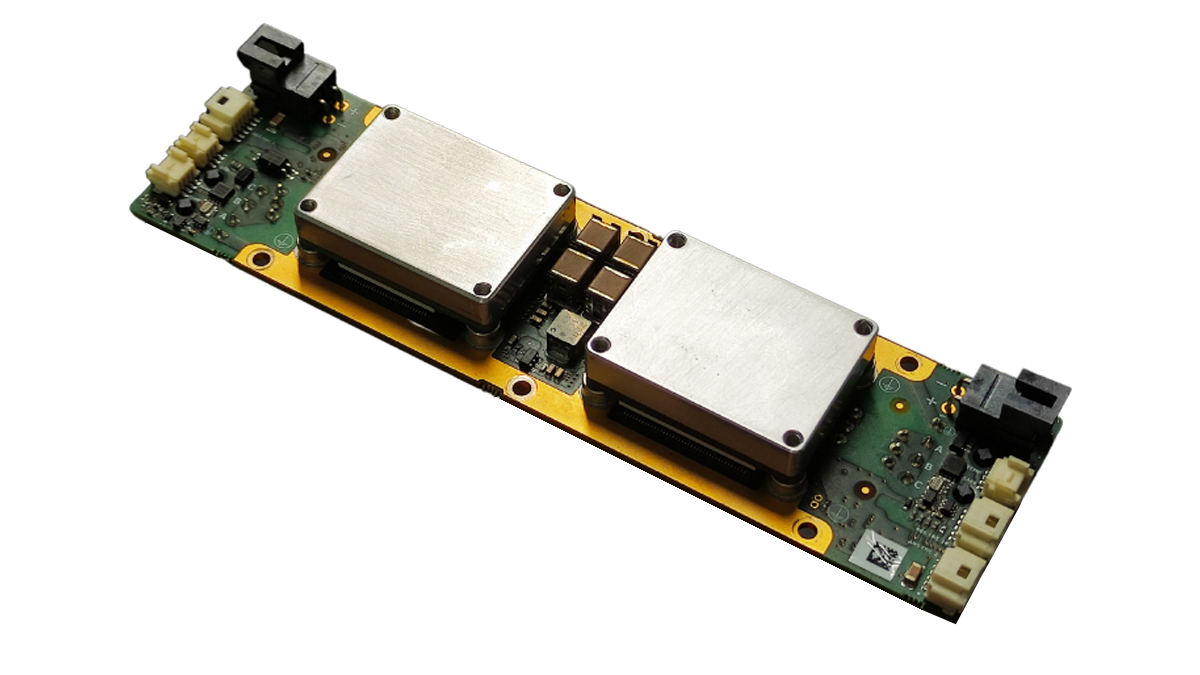
FOR
CAPITAN NET
- 60 VDC, 10 A continuous
- EtherCAT ready
- Dual simultaneous absolute encoder
- Electromechanical brake dedicated outputs
- Motor temperature sensor dedicated inputs
- STO redundant dedicated inputs
- Power supply, EtherCAT and STO daisy-chain connections on-board
- Logic supply on-board
- Collaborative robots
140 mm x 38 mm x 24.1 (including Capitan NET modules)