














Integrated Stepper Motors
Liberty MDrive®


Liberty MDrive® LM57 NEMA 23 Ethernet TCP/IP IP65
Compact integrated motor for industrial networks with EtherNet/IP, Profinet and Modbus. Feedback options include open loop, closed loop or absolute encoder with hMTechnology.
- Motor size: NEMA 23 (57 mm)
- Holding Torque range: 103 … 242 oz-in (73 … 171 N-cm)
- Input voltage: +12 to +60 VDC
General Specifications
| Specification | Value |
|---|---|
| Control Type | Ethernet TCP/IP |
| Communications Interface | Ethernet TCP/IP |
| Communications Features | EtherNet/IP, Modbus/TCP, Profinet I/O, MCode OS |
| NEMA Size | 23 (57 mm) |
| Torque Range | 103 … 425 oz-in (73 … 300 N-cm) |
| Heatsink Operating Temperature | 85°C |
| Motor Operating Temperature | 100°C |
| IP Rating | IP65 |
Electrical Specifications
| Specification | Value |
|---|---|
| Input Voltage | +12 … +60 VDC |
| Power Supply Current Requirement | 3.5 A |
| Aux-Logic Supply Voltage | 12 … 24 VDC |
| Aux-Logic Supply Current | 194 mA max |
I/O Specifications
| Specification | Value |
|---|---|
| Signal Inputs: +5 to +24 VDC | |
| Voltage Range | 5 … 24 VDC |
| Input Current @ +5 VDC | 8.7 mA |
| Input Current @ +24 VDC | 14.6 mA |
| Input Frequency | 5 kHz |
| Isolation | Galvanic |
| Protection Class | III |
| Analog Input | |
| Voltage Mode | 0 … 10 VDC |
| Current Loop Mode | 0 … 20 mA |
| Resolution | 12 bits |
| Isolation | None |
| Power Outputs | |
| Number of Open or Closed Loop | 2 |
| Number of Absolute Encoder | 1 |
| Voltage Rating | -24 … +24 |
| Current Rating | -100 … +100 mA |
| Protection | over temp, short circuit, transient, over voltage, inductive clamp |
| Isolation | Galvanic |
| Signal Outputs: 1 – 5.5 mA | |
| Voltage Open-Collector | 60 VDC |
| Voltage Open-Emitter | 7 VDC |
| Current Open-Collector | 5.5 mA |
| Current Open-Emitter | 5.5 mA |
| Isolation | Galvanic |
Motion Specifications
| Specification | Value |
|---|---|
| Open Loop (No encoder or hMT/Encoder Functions Off) | |
| Microstep Resolution (# of Settings) | 20 |
| Microstep Range | 200 … 51200 steps/rev |
| Counter Type | 32-bit Position |
| Counter Edge Rate | 5 MHz (max.) |
| Velocity Range | ±2560000 steps/sec, ±3000 RPM |
| Velocity Resolution | 0.5961 steps/sec |
| Accel/Decel Range | 1.5 X 10⁹ steps/sec² |
| Accel/Decel Resolution | 90.9 steps/sec² |
| Closed Loop (hMT/Encoder Functions On) | |
| Incremental Encoder Type | Internal, magnetic |
| Incremental Encoder Resolution | 1000 lines / 4000 edges |
| Multi-turn Absolute Encoder Type | Internal, magnetic |
| Multi-turn Absolute Encoder Data Retention (Internal Power) | 30 days |
| Multi-turn Absolute Encoder Data Retention (Battery Pack) | 5 years |
| Common Scaling (Encoder Counts : Full Step) | 20:1 |
| Common Counter Type | 32-bit Encoder |
| Common Encoder Functions (hMTechnology OFF) | Position maintenance, Find index, Stall detect |
| Common Encoder Functions (hMTechnology ON) | Anti-stall, Variable current control, Torque mode |
Software Specifications
| Specification | Value |
|---|---|
| MCode OS | |
| Program Storage Type | Flash |
| Program Storage | 11120 Bytes |
| User Registers (Integer) | 4 |
| User Registers (Floating Point) | 8 |
| User Registers (Length) | 32 Bits |
| Math | +, -, x, ÷, >, <, =, <=, >= |
| Logic | AND, OR, XOR, NOT |
| Trigonometric | ABS, COS, ACOS, LOG2, LOG10, PI, SIN, ASIN, SQRT, TAN, ATAN |
| Branch Functions | Branch & call |
| Input Functions | Home, limit plus, limit minus, go, stop, pause, jog plus, jog minus, general purpose, capture |
| Output Functions | Moving, error, velocity change, stall, locked rotor, moving position, hMT active, make-up active, encoder A, encoder B, trip, attention. general purpose, |
| Trip Functions | Trip on input, trip on position, trip on time, trip capture, trip on relative position, trip on main power loss |
| Encoder Functions | hMTechnology, stall detection, position maintenance, find index |
| EtherNet/IP (ODVA Confomance Checked) | |
| Object Model: 0x01 | Identity object |
| Object Model: 0x04 | Assembly object (parameters mappable) |
| Object Model: 0xF5 | TCP object |
| Object Model: 0xF6 | Ethernet object |
| Manufacturer Specific Object Classes: 0x64 | Setup instructions |
| Manufacturer Specific Object Classes: 0x65 | Miscellaneous instructions and flags |
| Manufacturer Specific Object Classes: 0x66 | Motion instructions and flags |
| Manufacturer Specific Object Classes: 0x67 | I/O instruction variables and flags |
| Manufacturer Specific Object Classes: 0x68 | Position related instructions and flags |
| Manufacturer Specific Object Classes: 0x69 | Encoder related instructions and flags1 |
| Manufacturer Specific Object Classes: 0x6A | hMTechnology specific instructions1 |
| Modbus/TCP | |
| Device ID: 43/14d (0x2B/0x0E) | Read device identification |
| Public Function Codes: 02d (0x02) | Read digital inputs |
| Public Function Codes: 01d (0x01) | Read coils (digital outputs) |
| Public Function Codes: 05d (0x05) | Write single coil (digital output) |
| Public Function Codes: 03d (0x03) | Read holding register |
| Public Function Codes: 16d (0x10) | Write multiple registers |
| Manufacturer Specific Function Codes: 65d (0x41) | Read I/O and trip configuration and parameters |
| Manufacturer Specific Function Codes: 66d (0x42) | Write I/O and trip configuration and parameters, enter upgrade mode. |
| Profinet IO | |
| Output | Slot 1 |
| Size | 128 Bytes |
| Registers | 34 |
| Input | Slot 2 |
| Register mapping | Variable, user defined |
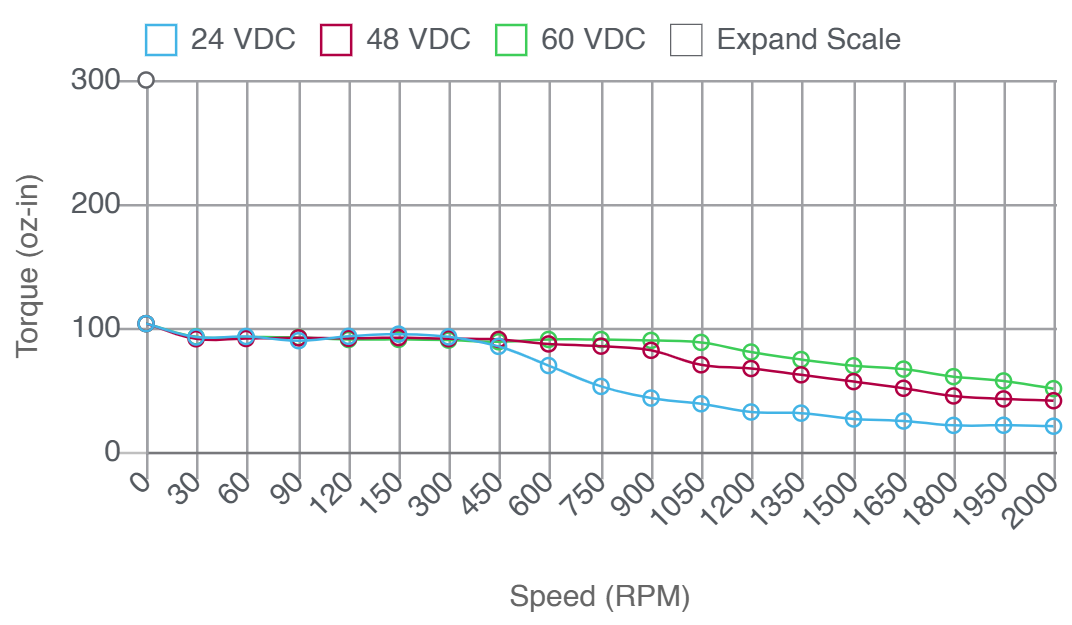
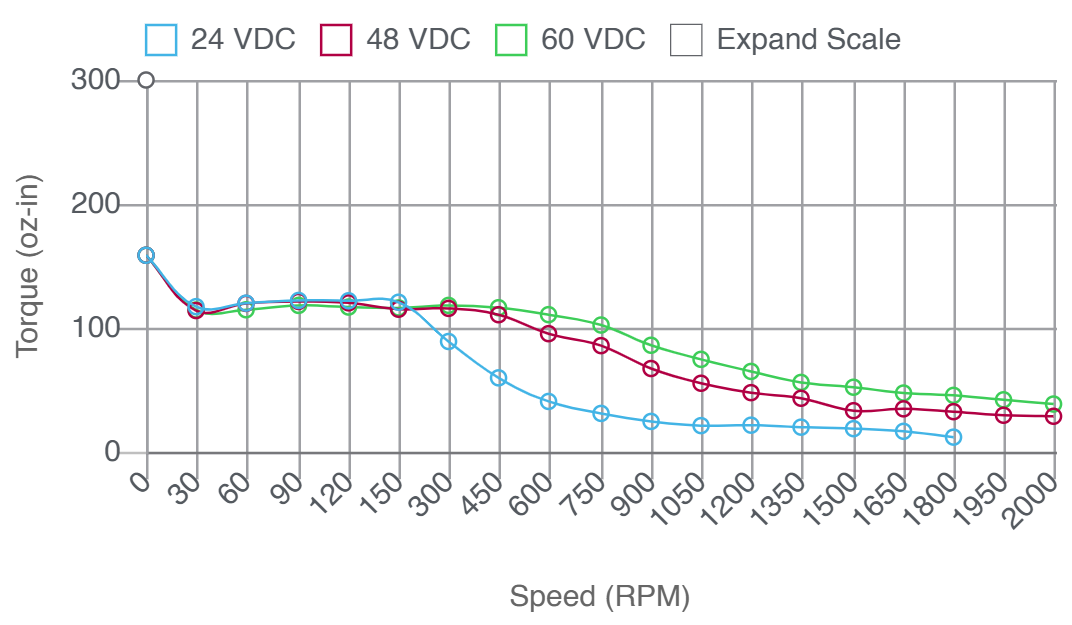
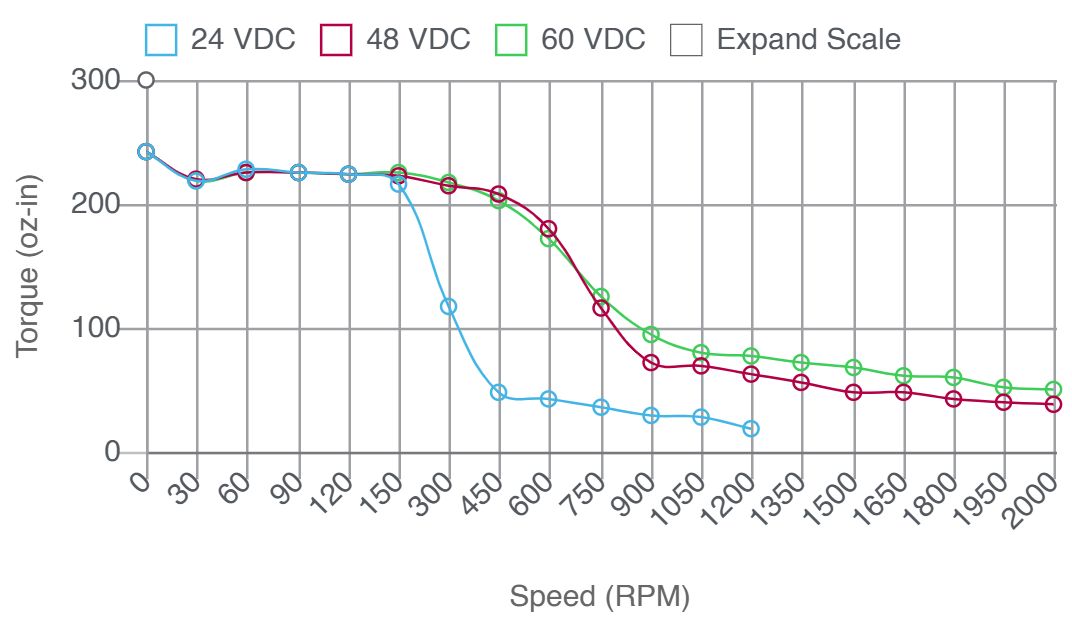
Motor Performance
Test conditions: 100% current with damper simulating load.
Single Stack Length
Double Stack Length
Triple Stack Length
Motor Specifications
| Single Length | Double Length | Triple Length | |
|---|---|---|---|
| Holding Torque | 103 oz-in (73 N-cm) | 159 oz-in (112 N-cm) | 242 oz-in (171 N-cm) |
| Rotor Inertia | 0.0025 oz-in-sec² (0.18 kg-cm²) | 0.0037 oz-in-sec² (0.26 kg-cm²) | 0.0065 oz-in-sec² (0.46 kg-cm²) |
| Detent Torque | 3.9 oz-in (2.7 N-cm) | 5.6 oz-in (3.9 N-cm) | 9.7 oz-in (6.9 N-cm) |
| Radial Load Limit | 15 lbs (6.8 kg) | ||
| Axial Load Limit | 20 lbs (9 kg) | ||
| Weight | 26.4 oz (748 gm) | 31.2 oz (885 gm) | 44 oz (1247 gm) |
Mechanical Dimensions
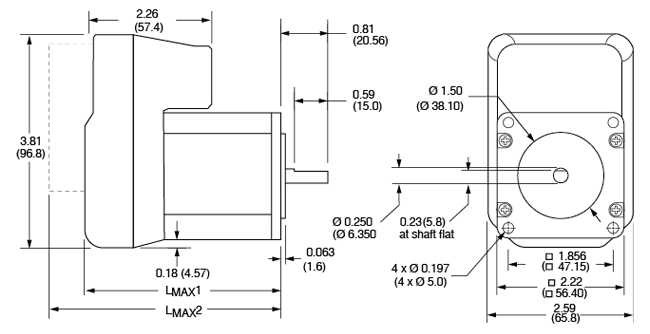
| Motor Length | Lₘₐₓ₁ | Lₘₐₓ₂* |
|---|---|---|
| Single | 3.32 in (84.3 mm) | 4.06 in (103.1 mm) |
| Double | 3.73 in (94.8 mm) | 4.47 in (113.6 mm) |
| Triple | 4.60 in (116.8 mm) | 5.35 in (135.8 mm) |
- Filter by Part Number
- ICP0531
- GEARBOX
- MD-CS640-000
- MD-CS620-000
- MD-CS610-000
| Part Number | Description | ||
|---|---|---|---|
 |
ICP0531 |
The ICP0531 Encoder Back-up Battery Pack will provide back-up power for the Liberty* MDrive Absolute Encoder circuitry, retaining and updating the position data for a period of up to five (5) years. The battery pack requires three (3) Energizer L91 1.5V AA Lithium batteries. |
|
 |
GEARBOX |
Powerful yet lightweight, suitable for complex production cycles due to low-friction bearing design and optimized lubrication. Straight and right angle configurations available in NEMA 17, 23 and 34 sizes as custom accessories for Novanta IMS motor and integrated motor products. To get started, complete the form below. |
|
 |
MD-CS640-000 |
The MD-CS640-000 is a 4-position, D-coded M12 male to RJ45 cable used to interface an Ethernet network to a Liberty* MDrive product. .Pre-wired shielded cables with straight M12 connector end for interfacing an Ethernet network. 6.5′ (2 m) M12 to RJ45 cable. |
|
 |
MD-CS620-000 |
The MD-CS620-000 is a 4-position, B-coded M12 female with flying leads cable used to interface DC power to Liberty* MDrive products. Pre-wired shielded cables with straight M12 connector end for interfacing DC power. 10′ (3 m) M12 to flying leads cable. |
|
 |
MD-CS610-000 |
The MD-CS610-000 is a 12-position, A-coded M12 female to flying leads cable used to interface I/O signals to Liberty* MDrive products. Pre-wired shielded cables with straight M12 connector end for interfacing logic and I/O. 10′ (3 m) M12 to flying leads cable. |
|
Talk to an Application Engineer
Work directly with our technical team to optimize motion configuration, system integration, and control interfaces.