














Integrated Stepper Motors
Liberty MDrive®


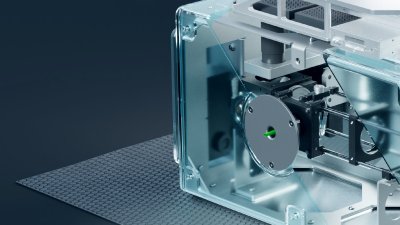
Liberty MDrive® LMD23 NEMA 23 Ethernet TCP/IP External Linear Actuator IP20
Compact integrated motor for industrial networks with EtherNet/IP, Profinet and Modbus. Feedback options include open loop, or closed loop with an incremental or multi-turn absolute encoder with hMTechnology.
- Motor size: NEMA 23 (57 mm)
- Input voltage: +12 to +60 VDC
General Specifications
| Specification | Value |
|---|---|
| Control Type | Ethernet TCP/IP |
| Communications Interface | CAN Bus 2.0B |
| Communications Features | EtherNet/IP, Modbus/TCP, Profinet I/O, MCode OS |
| NEMA Size | 23 (57 mm) |
| Torque Range | 103 … 242 oz-in (73 … 171 N-cm) |
| Heatsink Operating Temperature | 85°C |
| Motor Operating Temperature | 100°C |
| IP Rating | IP20 |
Electrical Specifications
| Specification | Value |
|---|---|
| Input Voltage | +12 … +60 VDC |
| Power Supply Current Requirement | 3.5 A |
| Aux-Logic Supply Voltage | 12 … 24 VDC |
| Aux-Logic Supply Current | 194 mA max |
I/O Specifications
| Specification | Value |
|---|---|
| Signal Inputs: +5 to +24 VDC | |
| Voltage Range | 5 … 24 VDC |
| Input Current @ +5 VDC | 8.7 mA |
| Input Current @ +24 VDC | 14.6 mA |
| Input Frequency | 5 kHz |
| Isolation | Galvanic |
| Protection Class | III |
| Analog Input | |
| Voltage Mode | 0 … 10 VDC |
| Current Loop Mode | 0 … 20 mA |
| Resolution | 12 bits |
| Isolation | None |
| Power Outputs | |
| Number of Open or Closed Loop | 2 |
| Number of Absolute Encoder | 1 |
| Voltage Rating | -24 … +24 VDC |
| Current Rating | -100 … +100 mA |
| Protection | Over temp, short circuit, transient, over voltage, inductive clamp |
| Isolation | Galvanic |
| Signal Outputs: 1 – 5.5 mA | |
| Voltage Open-Collector | 60 VDC |
| Voltage Open-Emitter | 7 VDC |
| Current Open-Collector | 5.5 mA |
| Current Open-Emitter | 5.5 mA |
| Isolation | Galvanic |
Motion Specifications
| Specification | Value |
|---|---|
| Open Loop (No encoder or hMT/Encoder Functions Off) | |
| Microstep Resolution (# of Settings) | 20 |
| Microstep Range | 200 … 51200 steps/rev |
| Counter Type | 32-bit Position |
| Counter Edge Rate | 5 MHz (max.) |
| Velocity Range | ±2560000 steps/sec, ±3000 RPM |
| Velocity Resolution | 0.5961 steps/sec |
| Accel/Decel Range | 1.5 X 10⁹ steps/sec² |
| Accel/Decel Resolution | 90.9 steps/sec² |
| Closed Loop (hMT/Encoder Functions On) | |
| Incremental Encoder Type | Internal, magnetic |
| Incremental Encoder Resolution | 1000 lines / 4000 edges |
| Multi-turn Absolute Encoder Type | Internal, magnetic |
| Multi-turn Absolute Encoder Data Retention (Internal Power) | 30 days |
| Multi-turn Absolute Encoder Data Retention (Battery Pack) | 5 years |
| Common Scaling (Encoder Counts : Full Step) | 20:1 |
| Common Counter Type | 32-bit Encoder |
| Common Encoder Functions (hMTechnology OFF) | Position maintenance, Find index, Stall detect |
| Common Encoder Functions (hMTechnology ON) | Anti-stall, Variable current control, Torque mode |
Software Specifications
| Specification | Value |
|---|---|
| MCode OS | |
| Program Storage Type | Flash |
| Program Storage | 11120 Bytes |
| User Registers (Integer) | 4 |
| User Registers (Floating Point) | 8 |
| User Registers (Length) | 32 Bits |
| Math | +, -, x, ÷, >, <, =, <=, >= |
| Logic | AND, OR, XOR, NOT |
| Trigonometric | ABS, COS, ACOS, LOG2, LOG10, PI, SIN, ASIN, SQRT, TAN, ATAN |
| Branch Functions | Branch & call |
| Input Functions | Home, limit plus, limit minus, go, stop, pause, jog plus, jog minus, general purpose, capture |
| Output Functions | Moving, error, velocity change, stall, locked rotor, moving position, hMT active, make-up active, encoder A, encoder B, trip, attention. general purpose, |
| Trip Functions | Trip on input, trip on position, trip on time, trip capture, trip on relative position, trip on main power loss |
| Encoder Functions | hMTechnology, stall detection, position maintenance, find index |
| EtherNet/IP (ODVA Confomance Checked) | |
| Object Model: 0x01 | Identity object |
| Object Model: 0x04 | Assembly object (parameters mappable) |
| Object Model: 0xF5 | TCP object |
| Object Model: 0xF6 | Ethernet object |
| Manufacturer Specific Object Classes: 0x64 | Setup instructions |
| Manufacturer Specific Object Classes: 0x65 | Miscellaneous instructions and flags |
| Manufacturer Specific Object Classes: 0x66 | Motion instructions and flags |
| Manufacturer Specific Object Classes: 0x67 | I/O instruction variables and flags |
| Manufacturer Specific Object Classes: 0x68 | Position related instructions and flags |
| Manufacturer Specific Object Classes: 0x69 | Encoder related instructions and flags1 |
| Manufacturer Specific Object Classes: 0x6A | hMTechnology specific instructions1 |
| Modbus/TCP | |
| Device ID: 43/14d (0x2B/0x0E) | Read device identification |
| Public Function Codes: 02d (0x02) | Read digital inputs |
| Public Function Codes: 01d (0x01) | Read coils (digital outputs) |
| Public Function Codes: 05d (0x05) | Write single coil (digital output) |
| Public Function Codes: 03d (0x03) | Read holding register |
| Public Function Codes: 16d (0x10) | Write multiple registers |
| Manufacturer Specific Function Codes: 65d (0x41) | Read I/O and trip configuration and parameters |
| Manufacturer Specific Function Codes: 66d (0x42) | Write I/O and trip configuration and parameters, enter upgrade mode. |
| Profinet IO | |
| Output | Slot 1 |
| Size | 128 Bytes |
| Registers | 34 |
| Input | Slot 2 |
| Register mapping | Variable, user defined |
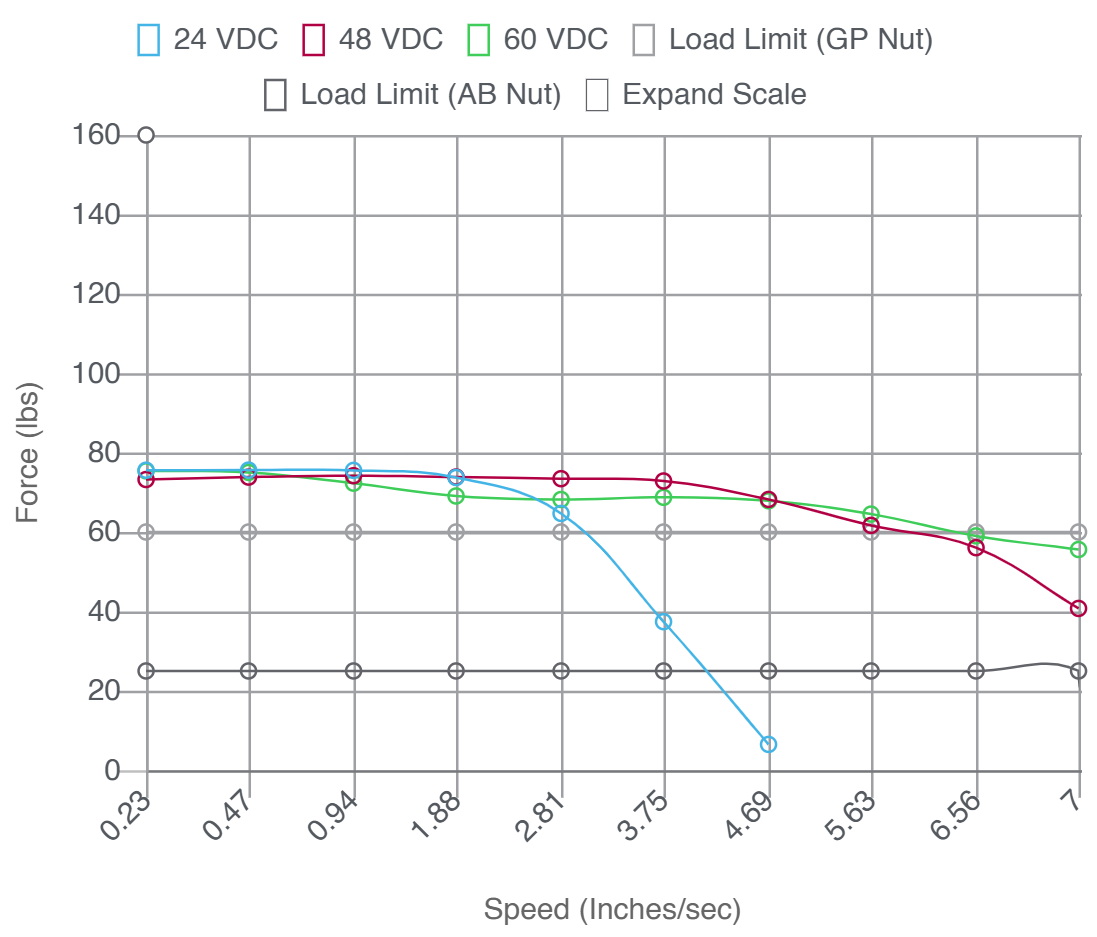
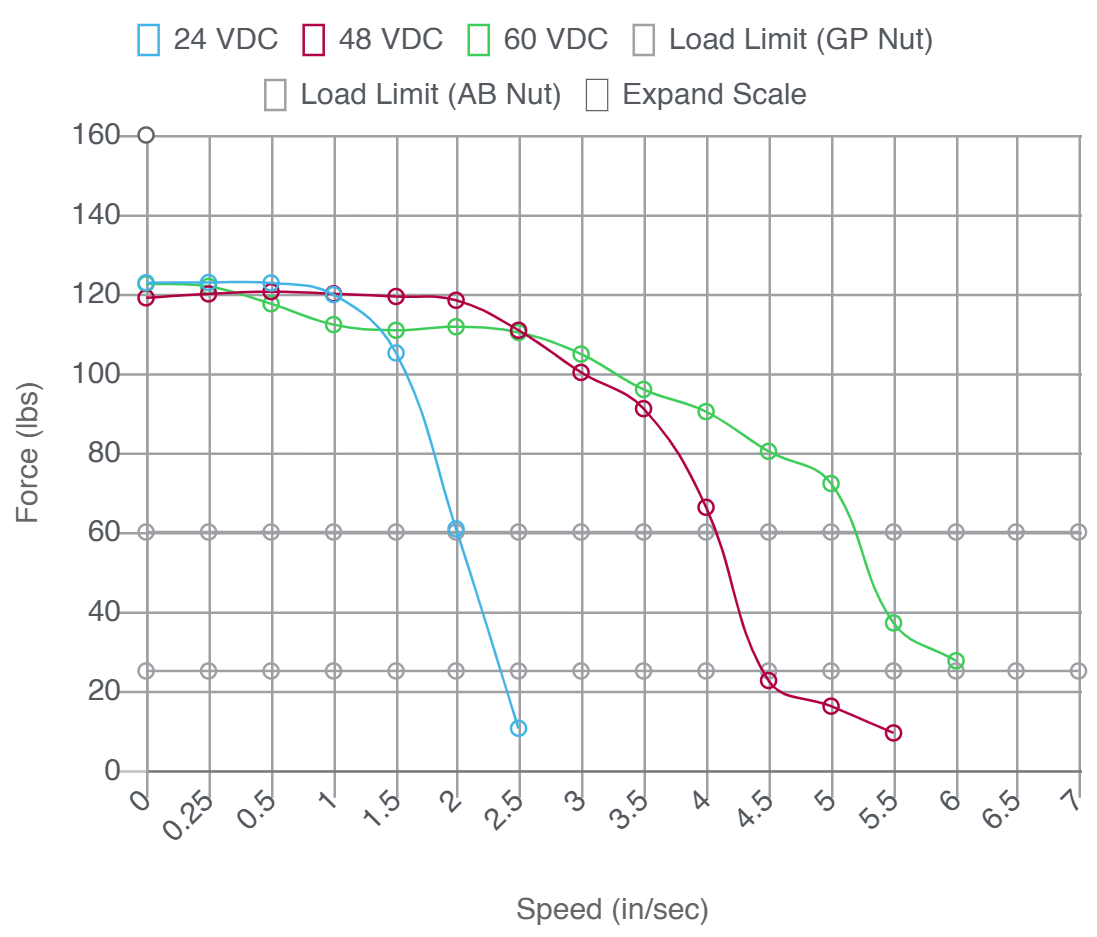
Motor Performance
Screw G
Screw A
Screw B
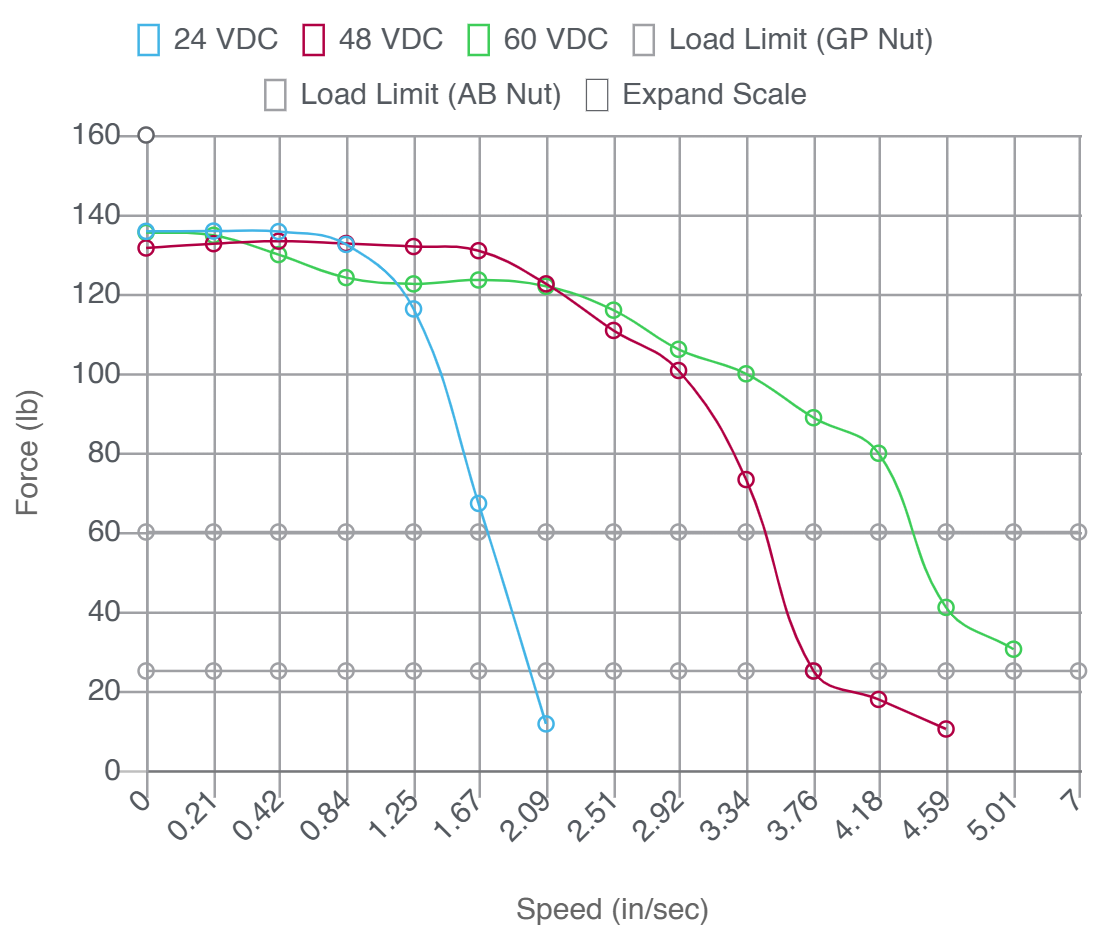
Screw D
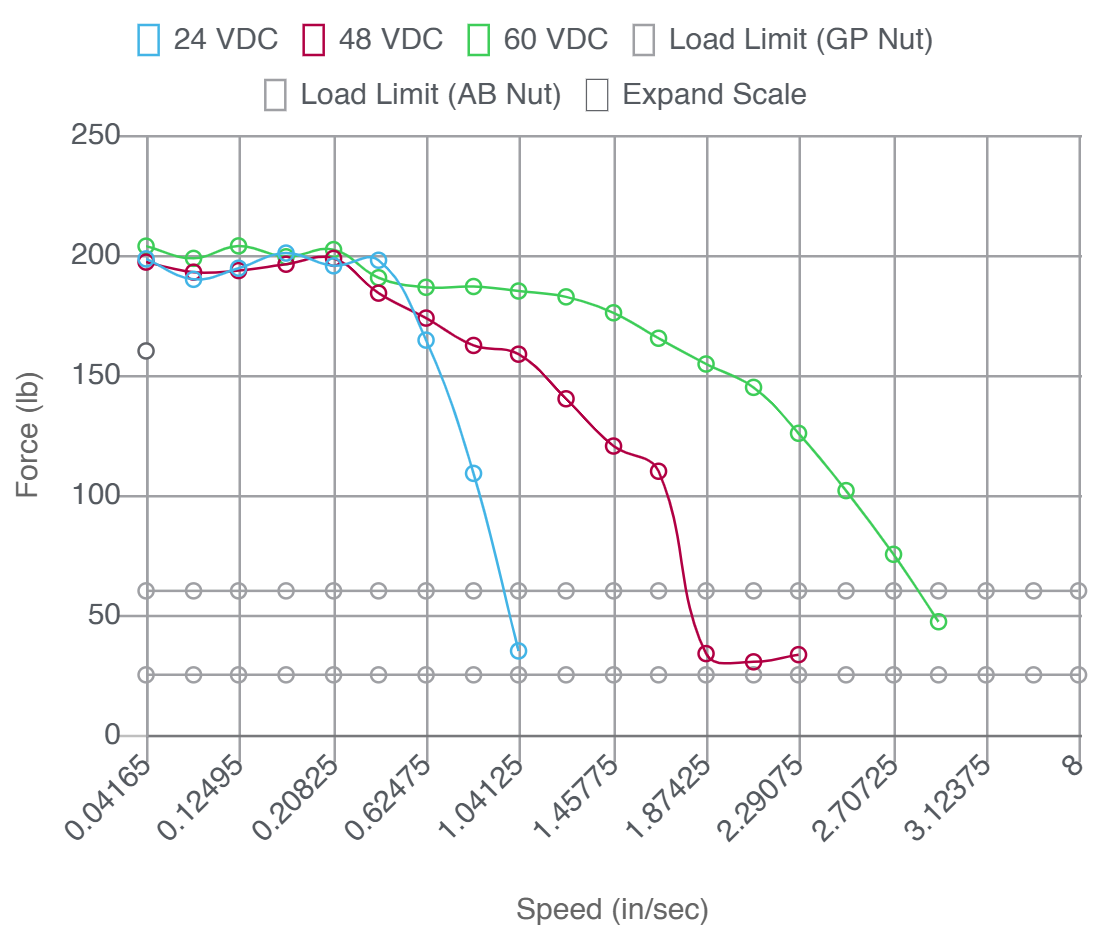
Screw Key
| Screw G | 0.3750 in (9.525 mm) per revolution |
| Screw A | 0.20 in (5.08 mm) per revolution |
| Screw B | 0.167 in (4.233 mm) per revolution |
| Screw D | 0.0833 in (2.116 mm) per revolution |
Do not exceed the nut’s rated thrust: 60 lbs (27 kg) for general‑purpose nuts and 25 lbs (11 kg) for anti‑backlash nuts.
Motor Specifications
| Attribute | Value |
|---|---|
| Maximum Screw Misalignment | ±1° |
| General Purpose Nut | |
| Maximum Thrust | 60 lbs (27 kg) |
| Maximum Repeatability | 0.005 in (-0.127 mm) |
| Anti-Backlash Nut | |
| Maximum Thrust | 25 lbs (11 kg) |
| Maximum Repeatability | 0.0005 in (0.0127 mm) |
| Motor | |
| Rotor Inertia | 0.0025 oz-in-sec² (0.18 kg-cm²) |
| Weight (Motor+Driver) | 24.8 oz (703 g) |
Leadscrew Characteristics
Screw Travel Specifications
| Travel Per Revolution | |
| Screw G | 9.525 mm (0.375 in) |
| Screw A | 5.08 mm (0.2 in) |
| Screw B | 4.233 mm (0.167 in) |
| Screw D | 2.116 mm (0.0833 in) |
| Travel Per Full Step | |
| Screw G | 0.0476 mm (0.001875 in) |
| Screw A | 0.0254 mm (0.001 in) |
| Screw B | 0.0212 mm (0.000835 in) |
| Screw D | 0.0106 mm (0.0004165 in) |
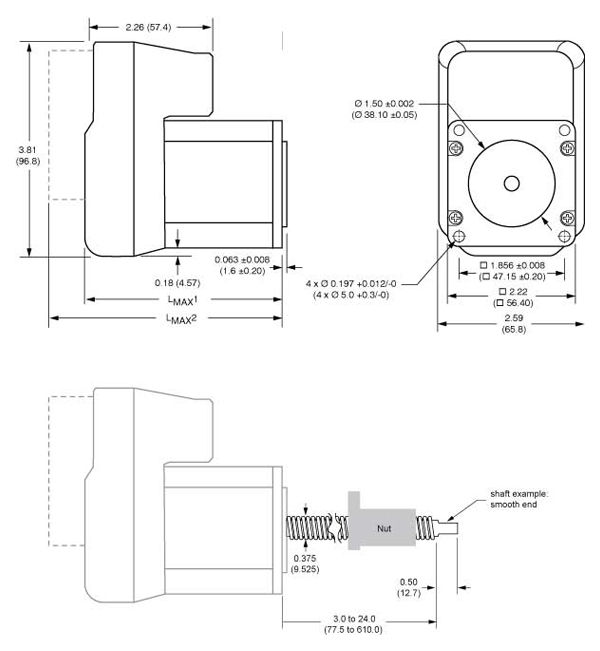
Dimensional Information
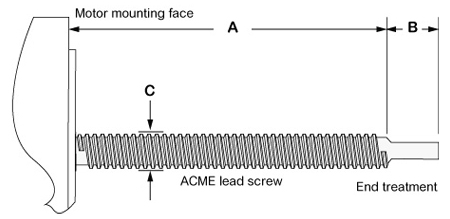
| A | 3.0–24.0 in / 77.5–610.0 mm; 0.1 in / 0.25 mm increments |
| B | 0.5 in (12.7 mm) |
| C | 0.375 in (9.525 mm) |
Nut Specifications
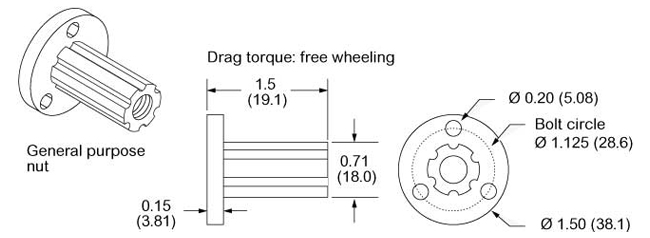
General Purpose Nut
For applications not requiring backlash and wear compensation. Round flange shape.
Max Thrust: 25 lbs (11 kg)
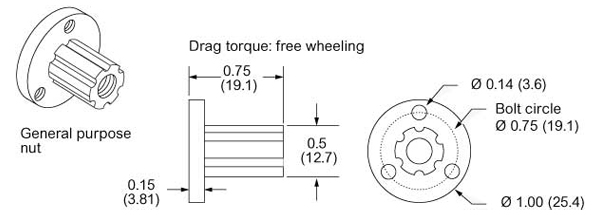
For applications not requiring backlash and wear compensation. Round flange shape.
Max Thrust: 60 lbs (25 kg)
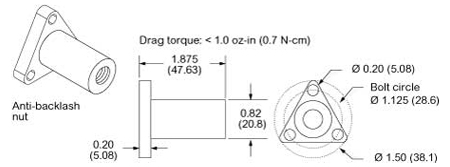
Anti-Backlash Nut
For applications requiring backlash-free operation for high accuracy and low drag torque. Triangle flange shape.
Factory-preloaded: The anti-backlash nut ships pre-loaded from the factory. Should you need to remove it please read the assembly instructions.
Max Thrust: 5 lbs (2 kg)

For applications requiring backlash-free operation for high accuracy and low drag torque. Triangle flange shape.
Factory-preloaded: The anti-backlash nut ships pre-loaded from the factory. Should you need to remove it please read the assembly instructions.
Max Thrust: 25 lbs (11 kg)
End Treatment Options
| None | — |
| Smooth | Ø 0.2362 in ± 0.001 (Ø 6 mm ± 0.003) |
| Threaded (Metric) | M6 x 1.0 thread to within 0.76 mm (0.03 in) of shoulder |
| Threaded (UNC) | 1/4‑20 UNC‑2A thread to within 0.05 in (1.3 mm) of shoulder |
Need a Custom Leadscrew Solution?
SEM offers numerous customization options for your lead screw. Contact us to learn more!
Leadscrew Maintenance Statement
While under optimal conditions lubrication interval is expected to occur approximately once every 1000 hours of service. Actual life will depend on application and environment. Based upon this, frequent inspections must be performed and a maintenance interval determined based on actual conditions.
Recommended lubricant: Dupont Krytox GPL 206
Mechanical Dimensions
- Filter by Type
- Datasheet
- Hardware Manual
- Software Manual
- Software Interface
- Filter by Part Number
- ICP0531
- CK-15
| Part Number | Description | ||
|---|---|---|---|
 |
ICP0531 |
The ICP0531 Encoder Back-up Battery Pack will provide back-up power for the Liberty* MDrive Absolute Encoder circuitry, retaining and updating the position data for a period of up to five (5) years. The battery pack requires three (3) Energizer L91 1.5V AA Lithium batteries. |
|
 |
CK-15 |
Kit includes one 2-pin power mate, and one set (2 pieces) 7-pin multi-function mates for Liberty* MDrive Motion Control, Ethernet TCP/IP and CANopen models. |
|
Talk to an Application Engineer
Work directly with our technical team to optimize motion configuration, system integration, and control interfaces.