














Integrated Stepper Motors
MDrive® Plus


MDrive® Plus MLI3 NEMA 23 Non-captive Linear CANopen IP20
MDrive Plus NEMA size 23 (57 mm) integrated stepper motor linear actuator. This is a CANopen CAN bus 2.0b supporting CiA301 and CiA402.
- Holding torque range oz-in (N-cm): 90 …283 (64 … 200)
- I/O connector options: Wire Crimp
- Com connector: DB9
General Specifications
| Specification | Value |
|---|---|
| Control Type | CANopen |
| Feature Set | Standard (Plus) |
| P1 Connector Options (Power & I/O) | Wire Crimp |
| P2 Connector Options (Comm) | DB9 |
| Communications Interface | CANopen |
| Communications Features | CANopen DS301, DSP402 |
| NEMA Size | 23 (57 mm) |
| Torque Range | 90 … 283 oz-in (64 … 200 N-cm) |
| Heatsink Operating Temperature | 85°C |
| Motor Operating Temperature | 100°C |
| IP Rating | IP20 |
Electrical Specifications
| Specification | Value |
|---|---|
| Input Voltage | +12 … +75 VDC |
| Power Supply Current Requirement | 2.0/3.5* A |
| Aux-Logic Supply Voltage | 12 … 24 VDC |
| Aux-Logic Supply Current | 194 mA max |
I/O Specifications
| Specification | Value |
|---|---|
| General Purpose | |
| # of I/O | 4 I/O points, programmable as sinking outputs or sinking and sourcing inputs |
| Logic Range | Inputs and outputs tolerant to +24 VDC, inputs TTL compatible |
| Output Sink Current | Up to 600 mA per channel |
| Isolation | None |
| Protection | Over temp, short circuit, transient over voltage, over voltage, inductive clamp |
| Dedicated I/O | |
| Function | Caputure input, trip output |
| Logic range | 0 to +5 VDC, TTL compatible |
| Analog Input | |
| Resolution | 10 bits |
| Range (Selectable) | 0 to +5 VDC, 0 to 10 VDC, 0 to 20 mA, 4 to 20 mA |
Motion Specifications
| Specification | Value |
|---|---|
| Open Loop (No encoder or hMT/Encoder Functions Off) | |
| Microstep Resolution (# of Settings) | 20 |
| Microstep Range | 200 … 51200 steps/rev |
| Counter Type | Position and Encoder |
| Counter Resolution | 32 bits |
| Counter Edge Rate | 5 Mhz |
| Velocity Range | ±5000000 steps/sec |
| Velocity Resolution | 0.5961 steps/sec |
| Accel/Decel Range | 1.5 X 10⁹ steps/sec² |
| Accel/Decel Resolution | 90.9 steps/sec² |
| with Encoder option | |
| Encoder Type | Internal, differential, magnetic |
| Resolution | 512 lines (2048 edges) |
| Steps/Rev | 51200 |
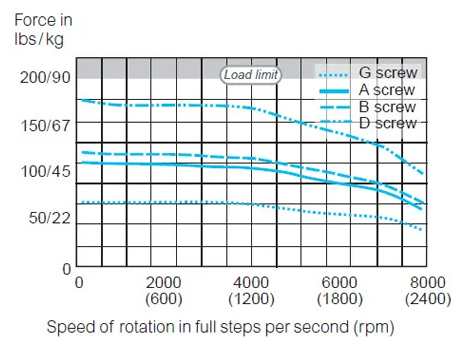
Motor Performance
Test conditions: maximum force/load is based on a static load. This will vary with a dynamic load.
24 VDC
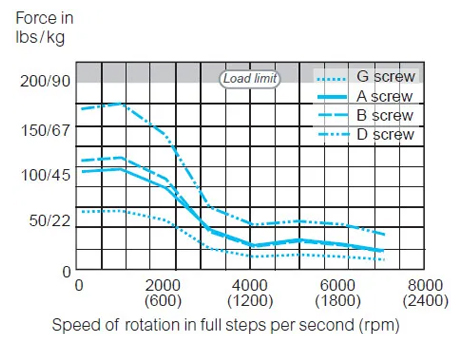
48 VDC
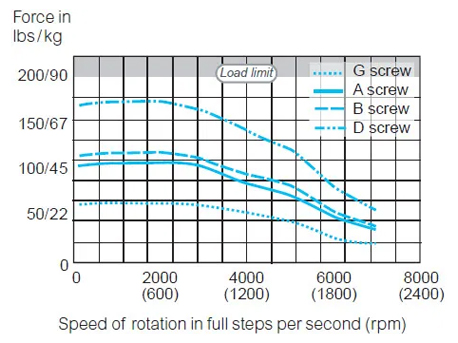
75 VDC
Motor Specifications
| Attribute | Value |
|---|---|
| Holding Torque | 90 oz-in (64 N-cm) |
| Maximum Screw Misalignment | ±1° |
| Maximum Thrust | 200 lbs (97 kg) |
| Maximum Repeatability | 0.005 in (0.127 mm) |
| Motor | |
| Rotor Inertia | 0.0025 oz-in-sec² (0.18 kg-cm²) |
| Weight (Motor+Driver) | 22 oz (625 g) |
Leadscrew Characteristics
Screw Travel Specifications
| Travel Per Revolution | |
| Screw G | 9.525 mm (0.375 in) |
| Screw A | 5.08 mm (0.2 in) |
| Screw B | 4.233 mm (0.167 in) |
| Screw D | 2.116 mm (0.0833 in) |
| Travel Per Full Step | |
| Screw G | 0.0476 mm (0.001875 in) |
| Screw A | 0.0254 mm (0.001 in) |
| Screw B | 0.0212 mm (0.000835 in) |
| Screw D | 0.0106 mm (0.0004165 in) |
Nut Specifications
The nut is located internal to the motor.
Max Thrust: 200 lbs (91kg)
End Treatment Options
| None | — |
| Smooth | Ø 0.1967 in ± 0.001 (Ø 5 mm ± 0.003) |
| Threaded (Metric) | M4 x 0.7 thread to within 0.76 mm (0.03 in) of shoulder |
| Threaded (UNC) | #8‑32 UNC‑2A thread to within 0.03 in (0.76 mm) of shoulder |
Need a Custom Leadscrew Solution?
SEM offers numerous customization options for your lead screw. Contact us to learn more!
Leadscrew Maintenance Statement
While under optimal conditions lubrication interval is expected to occur approximately once every 1000 hours of service. Actual life will depend on application and environment. Based upon this, frequent inspections must be performed and a maintenance interval determined based on actual conditions.
Recommended lubricant: Dupont Krytox GPL 206
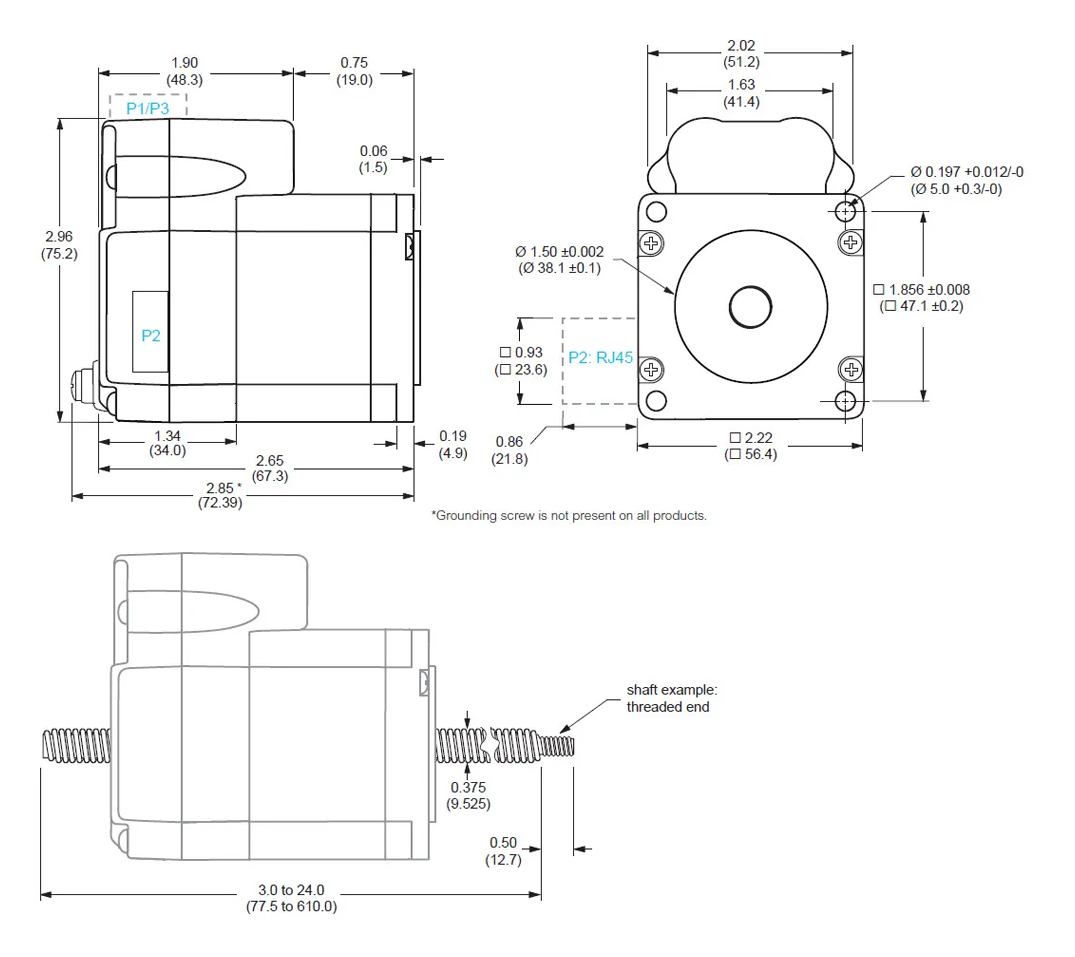
Mechanical Dimensions
Talk to an Application Engineer
Work directly with our technical team to optimize motion configuration, system integration, and control interfaces.