
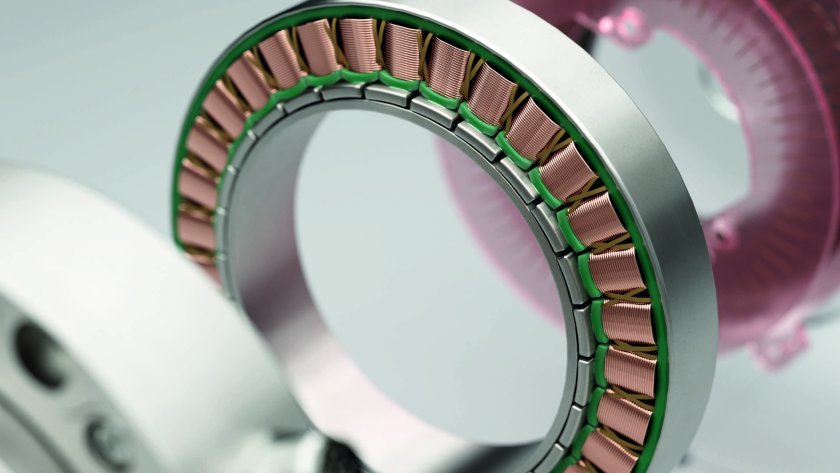
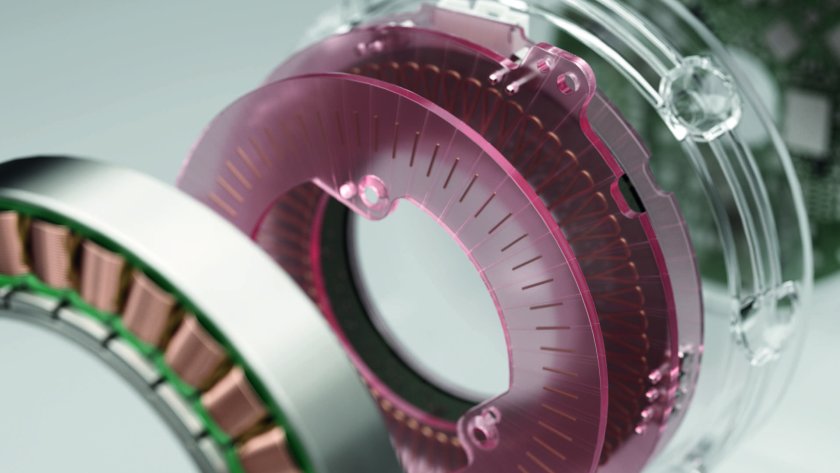














Humanoid robotics refers to a specialized field of robotics that involves the manufacturing and application of bipedal (two-legged) robots that stand upright, and resemble the human body, giving them the appearance of having a humanoid form. They typically have limbs like humans, including a head, torso, arms, and legs. These robots are designed to replicate human movement and execute human-like actions with precision. By integrating artificial intelligence and advanced position sensory technology, these built-for-purpose robots can execute predefined tasks, engage with their surroundings, and support automation across various fields. Humanoid robots use advanced motion control systems that incorporate cutting-edge servo drives, frameless rotary motors, optical rotary encoders, and AI to perform tasks such as walking around a space, gripping and handling different objects, lifting items, and responding to human or computerized commands. These robots are primarily used in industries like medical, manufacturing, science, research, and service automation. This specialist guide has been compiled by our robotics experts to give you a comprehensive understanding of what humanoid robotics is, how these types of robots work, how they are programmed and trained, crucial safety features they have built in, and the benefits and challenges associated with them.
Jumplinks
- How do Humanoid Robots Work?
- How are Humanoid Robots Programmed & Trained?
- Safety Features of Humanoid Robotics
- What are the Benefits of Humanoid Robotics?
- What Challenges are Associated with Humanoid Robotics?
Discuss Parts for Humanoid Robotic Manufacturing With an Expert
Discover utilizing the industry-leading Celera Motion products that are enhancing the capabilities and performance of humanoid robotics.
Our team is available to discuss specific parts and individual requirements of a build.
How do Humanoid Robots Work?
When exploring what is humanoid robotics as a discipline, one prominent question everyone asks is “how do humanoid robotics work?”.
Humanoid robots operate using artificial intelligence models that allow them to learn and closely imitate human behavior. The integrated AI allows the system to learn capabilities such as perception, sensing, planning, and task execution in complex environments, often alongside or in collaboration with humans.
These robots are equipped with motion control systems and advanced software that enable autonomous navigation and real-time processing of their surroundings. Software that enables them to self-navigate and adapt to external factors that may affect movement or performance.
They are first taught human movements, responses and tasks in simulated environments, then in real-world controlled environments. This is so they can react to the unpredictable nature of the real world. Once out in the field, humanoid robots continue to learn and refine their performance through various adaptive learning techniques tailored to their specific roles. They learn more and improve performance on their specific use cases via multiple learning methods.
How are Humanoid Robots Programmed & Trained?
Humanoid Robot Training Techniques
A multitude of training techniques have been tried and tested for training and improving the quality of humanoid robotics.
Machine Learning
Machine learning enables robots to process large sets of data, often collected through sensors, cameras, or simulated environments, to identify patterns, predict outcomes, and make decisions.
These algorithms include supervised learning (where the robot is trained on labelled data), unsupervised learning (where it finds structure in unlabeled data), and reinforcement learning.
Through repeated exposure to data and tasks, the robot adjusts its internal models to improve future performance. For instance, a humanoid robot learning to walk may analyze thousands of steps, adjusting its balance and stride based on previous outcomes.
Imitation Learning
Imitation learning involves training robots to mimic human actions by observing demonstrations.
Using motion-capture systems, the robot records the movements of a human performing a task. This data is then processed using pose estimation and trajectory-mapping algorithms, which convert visual input into executable commands. The servo system processes these commands and dictates the level of torque and movement required from the motors. The robot refines its movements over time to closely match the observed human behavior.
This method is particularly effective for teaching robots tasks that are difficult to program manually, such as folding material, winding up rope or cable, or making subtle hand gestures.
Positive & Negative Reinforcement
This technique is based on reinforcement learning, where a robot learns through trial and error by interacting with its environment. It uses a reward function, typically a mathematical model, to evaluate the outcome of every action the robot carries out.
When a robot performs a correct or desirable action, it receives a positive reward. When it fails or makes an error, it receives a negative reward or value. Over many iterations, the robot learns to favor actions that maximize rewards and avoid those that lead to negative values.
This dynamic feedback loop helps improve decision-making and fine-tunes behaviors for greater task efficiency and accuracy, such as navigating through a cluttered room without colliding with anything.
Safety Features of Humanoid Robotics
Humanoid robots are built with functional safety in mind. These types of robots feature hardware and software that is reliable and fully certified, and designed to help them operate with no risk of harm to humans or other machinery in their environment or themselves.
As well as preventing collisions that could cause material damage and unwanted, potentially costly repairs, the main need for safety features in humanoid robotics is to prevent accidents. As a standard practice in the field of humanoid robotics, humanoid robots are programmed to acknowledge the presence of nearby humans to adapt accordingly and ensure safe coexistence and collaboration at all times.
High-resolution sensors used within these robots are tested and validated to ensure that the robots can always accurately perceive their environment.
Functional Safety Measures in Humanoid Robotics
Complex Sensor Redundancy
Humanoid robots use multiple sensors within their functional operation to allow them to cross-verify data for increased reliability. This is a backup feature – if one sensor fails or gives incorrect information, others can provide a secondary reading, reducing the risk of dangerous errors.
Sensors used include optical rotary encoders for providing feedback on joint angles, positions, and speed, inductive sensors for proximity and distance sensing, force torque sensors, motion detection cameras, and LIDAR.
Safety-Rated Sensors
These are sensors that are designed to meet strict safety standards, such as ISO 13849 or IEC 61508, without increasing energy consumption or carbon footprint. They allow humanoid robots to detect hazards or human proximity reliably without significantly increasing production costs.
High-Speed Safety Processing
Humanoid robots are designed with high-speed safety processing capabilities. They can rapidly analyze sensor data and execute safety-critical decisions, such as stopping motion, altering a path, or shutting down systems in real-time, often within milliseconds.
This ultra-fast form of data processing ensures that sudden changes in motion, such as emergency stops, can happen almost instantly. Overall, this safety feature reduces reaction time and helps prevent injuries or damage in dynamic environments.
Wireless Safety Communication
Wireless safety communication refers to the transmission of safety-critical data over wireless channels, such as Wi-Fi, Bluetooth, or proprietary radio systems, with real-time reliability and integrity.
This safety-conscious feature increases system flexibility. It enables secure, real-time transmission of safety data between components within a servo system, such as emergency stop commands or idle/maintenance status, without the need for physical wiring. This reduces the risk of wiring faults caused by external factors.
Human Presence Detection
This safety awareness feature allows humanoid robots to detect nearby humans using sensors like vision, infrared, or ultrasonic.
It can slow down, stop, or change behavior to avoid collisions or unsafe interactions.
Essentially, human presence detection is the robot’s ability to detect the location, proximity, or movement of people in its environment using various sensing technologies. It’s considered a key part of ensuring safe and intelligent interaction between robots and humans.
Perception for Rule-Based Control
The robot uses its perception system, utilizing vision and sound, to understand the environment and apply predefined safety rules, for example, do not move if a human is within 1 meter.
This safety feature ensures that the humanoid robot only executes predictable, safe responses for the benefit of those working with or alongside the machine.
Humanoid Robotics Global Safety Standards
Humanoid robotics deals with several set safety standards, some of the main ones include:
- ISO 13482 in personal care robots.
- ISO 10218 in industrial robotics.
- ANSI/RIA R15.08 in AMRs.
- JIS B 8445 in Japan.
- CSA Z434 in Canada.
Emerging Frameworks
Several other safety standards can also apply to humanoid robots, depending on how the machine is being used. Some notable safety standards include:
- UL 4600, ISO 26262, and ISO 21448: these are vehicle-focused standards that relate to system-level hazard assessment, safety function independence, monitoring of joint torques, trajectories and ground contact, and edge-case handling, like slip recovery or surprise human interaction.
- IEC 61508: this standard applies to electrical systems, informing sensor and control reliability.
- BSI 8611: this covers ethical robot deployment. A standard that is critical for public-facing humanoid robots.
What are the Benefits of Humanoid Robotics?
Seamless Integration into Human-Centric Environments
Robot humanoids can effortlessly adapt to human environments without significant changes to existing processes and facilities. This means companies that invest in such robotics benefit from the fact that not much configuration or integration is required to get systems operational. Less downtime to install humanoid robots within an existing environment is a key cost-saving benefit.
High-Versatility
After proper training, humanoid robots can perform a wide array of tasks using the same tools and equipment as humans. They are particularly useful in environments where physically demanding tasks can prove tough for human workers.
One of the main applications of humanoid robots is to elevate physically demanding tasks for human workforces, to reduce workplace injuries and long-term damages caused by excessive labor.
Robot-Human Collaboration
Through behavior mimicking and machine learning, humanoid robots can collaborate effectively with humans, which improves efficiency and productivity. The main benefit here is overall improved output and increased productivity levels in environments where humans and robots can work together to achieve desired goals faster.
Improved Safety for Humans
Humanoids can work well in environments that could be potentially hazardous to humans, reducing the risk of accidents, harm to human employees, and disruptions in productivity and uptime.
This is arguably the most important benefit of human robotics. One of the key principles of applying humanoid robotics in industrial environments is to use the machines for potentially dangerous tasks in order to safeguard human health.
What Challenges are Associated with Humanoid Robotics?
As is the case with all forms of machinery and robotics, as well as crucial benefits, using humanoid robotics also comes with some challenges.
Training Data is Difficult to Collect
Because there are so many potential scenarios that could occur in any one working environment, it’s difficult to effectively train humanoid robots to be able to read and respond to all potential events.
Synthetic data can be useful to bridge the gap, however, it struggles to match the complexities of real-world interactions as effectively as a human brain can in terms of making in-the-moment, conscious and reactive decisions.
Design Constraints
Humanoids need to be lightweight, compact, and versatile to make them effectively mobile and good at their job, whilst also requiring powerful components and sensors to help replicate human behavior as best as possible.
This kind of smart yet weight-reducing technology takes a long time to develop and certify. It can also be expensive, depending on the scale of the robot(s) needed and the precision of the tasks they are required to carry out.
Energy Efficiency
Furthermore, in line with the design factor touched on above, to maintain a compact and lightweight design, there is often very limited space for onboard batteries with large capacities in humanoid robots.
Humanoid robot batteries need to be highly efficient to minimize energy consumption whilst maximizing productivity, reducing downtime needed to recharge.
Motion Control Complexity
To replicate human behavior, these types of robots require numerous degrees of freedom to move with precision in the same way that humans do. This requires massively complex motion control systems that ensure proper balance and coordination in challenging environments.
Celera Motion: Helping to Facilitate the Advancement of Humanoid Robotics
As is the case with all forms of machinery and robotics, as well as crucial benefits, using humanoid robotics also comes with some challenges.
Training Data is Difficult to Collect
Because there are so many potential scenarios that could occur in any one working environment, it’s difficult to effectively train humanoid robots to be able to read and respond to all potential events.
Synthetic data can be useful to bridge the gap, however, it struggles to match the complexities of real-world interactions as effectively as a human brain can in terms of making in-the-moment, conscious and reactive decisions.
Design Constraints
Humanoids need to be lightweight, compact, and versatile to make them effectively mobile and good at their job, whilst also requiring powerful components and sensors to help replicate human behavior as best as possible.
This kind of smart yet weight-reducing technology takes a long time to develop and certify. It can also be expensive, depending on the scale of the robot(s) needed and the precision of the tasks they are required to carry out.
Energy Efficiency
Furthermore, in line with the design factor touched on above, to maintain a compact and lightweight design, there is often very limited space for onboard batteries with large capacities in humanoid robots.
Humanoid robot batteries need to be highly efficient to minimize energy consumption whilst maximizing productivity, reducing downtime needed to recharge.
Motion Control Complexity
To replicate human behavior, these types of robots require numerous degrees of freedom to move with precision in the same way that humans do. This requires massively complex motion control systems that ensure proper balance and coordination in challenging environments.
Celera Motion: Helping to Facilitate the Advancement of Humanoid Robotics
At Celera Motion, we provide best-in-class
designed to meet the demands of humanoid robotics.
Our portfolio includes key components for achieving human-like movement, dexterity, and perception in humanoid robots.
Explore our range of motion control solutions and discover how our technology can enhance your robotics projects.
Consult the Celera Motion Experts Today
Contact our team for guidance on selecting the right components for your application.




