













inductive encoders
Custom
Inductive
Encoders
Precision in the extreme.
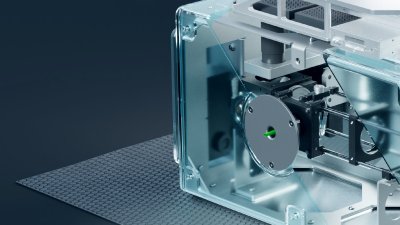
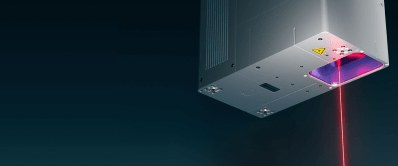
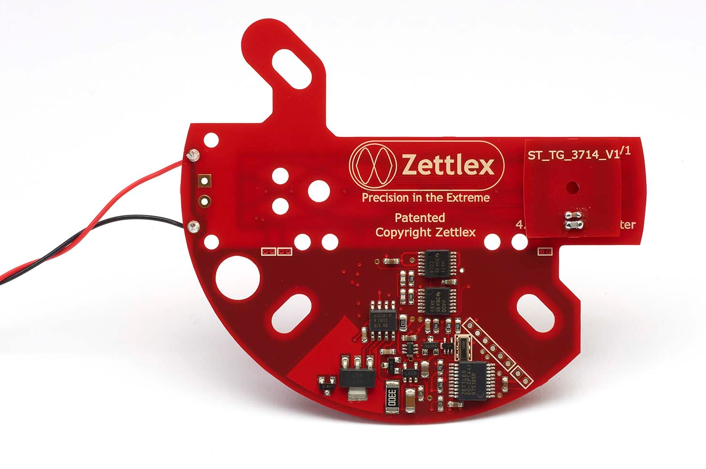
Novanta’s inductive encoders are capable of operating under the harshest conditions without compromising any accuracy.
What can be customized
Engineers often need encoder performance and form factor tuned to their mechanism. We customize across mechanical, electrical, and environmental domains:
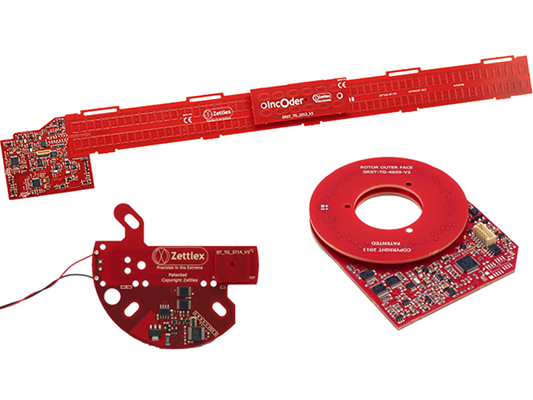
Shape & Mechanical Envelope
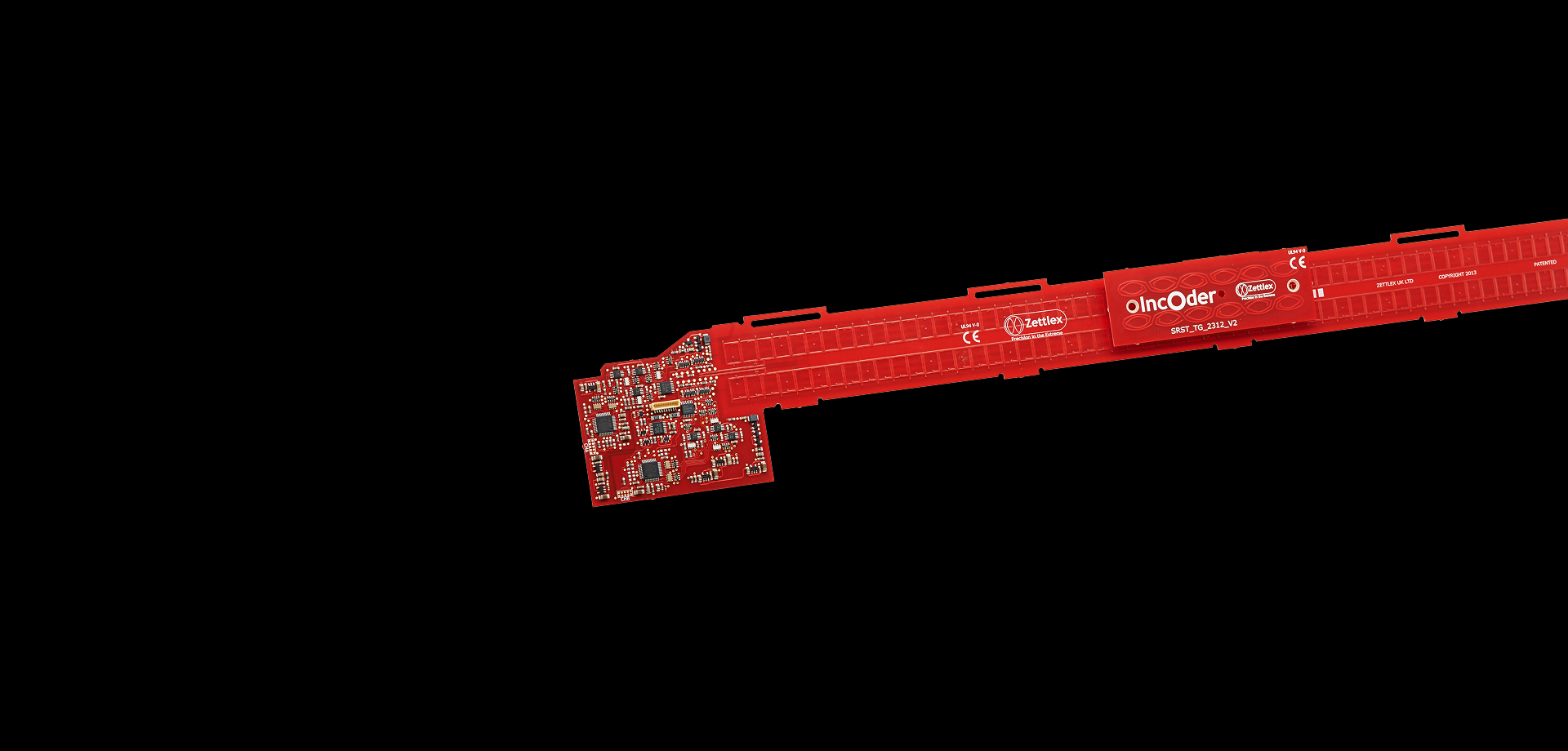
From large‑bore ring, pancake, and compact kit‑style rotary formats to long‑travel linear designs with passive targets, our low‑profile frameless solutions
Mounting & Housing
Unpackaged (PCB kit) or housed versions; axial/radial connector orientations; screw or dowel mounting patterns; metal exclusion zones and standoffs designed to suit.

Bore, Stroke & Air Gaps
Large hollow bores for through‑shafts, cables, or optics in gimbals; linear strokes from millimeters to meters, depending on application
Outputs and Protocols
Available interfaces span absolute digital formats (SSI, BiSS‑C, SPI, async serial), incremental ABZ outputs, and analog 4–20 mA or voltage signals for simple, direct PLC integration
Electrical and Power
Supply ranges (typically 5–12 V), update rates up to 10 kHz on compact cores; redundancy (duplex formats) for safety cases

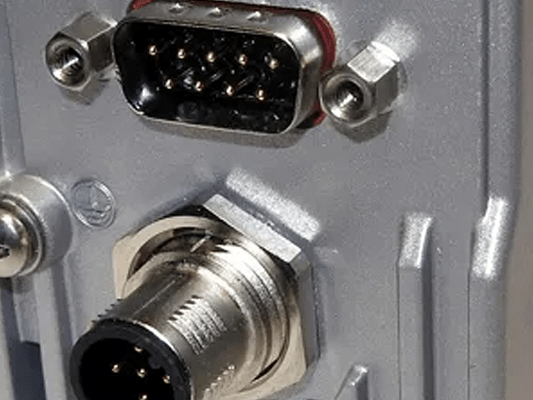
Connectors & Cables
Micro connectors (e.g., PicoClasp) or ruggedized cable assemblies; single‑connector solutions for power+data to simplify routing in rotating systems
Calibration and Accuracy
Factory or in‑situ calibration to tighten total system accuracy—up to 10 arcsec on field‑calibrated variants—while keeping inductive robustness.
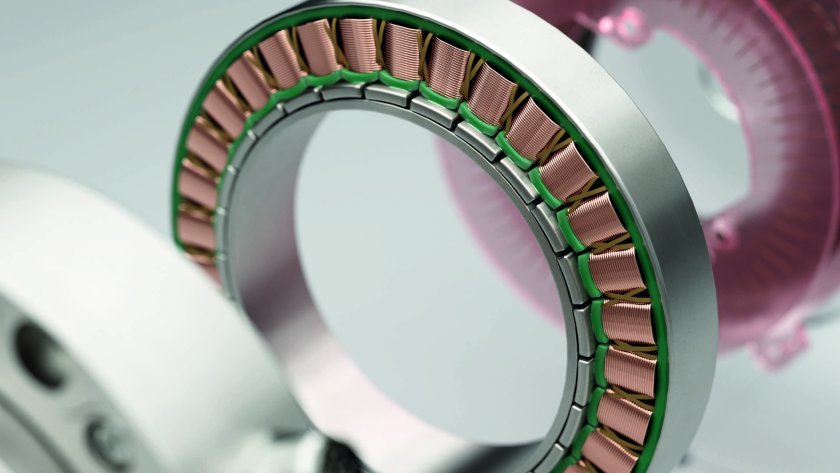
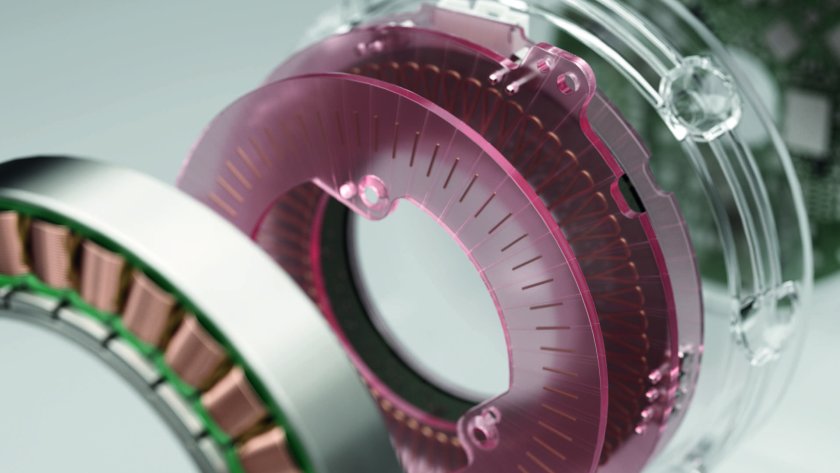
Sensor Design – Resonant, non-resonant, duplex inductive sensors
Novanta hold numerous patents for inductive sensor technology, and are continually improving and evolving the performance of our inductive sensor technology.

Safety / Redundancy
For example: Drop‑in servo/PLC compatibility (SSI/BiSS‑C/4–20 mA), programmable zero/span and switch points, and relaxed mechanical tolerances to minimize rework on host assemblies
Product Specification
Requirements
If you want to specify an OEM or custom sensor, then cover these 10 points and you will have covered all necessary aspects:
- Geometry – for example, linear or rotary or curvi-linear or 2D or 3D
- Full-scale – for example, 360 degrees or 600mm
- Resolution – in other words, the smallest change that must be measured – for example 0,1 degrees or 0,2mm
- Repeatability – in other words, the stability of the measurement in terms of going back to the same point – for example repeatability = +/-0,025mm
- Linearity – the maximum allowable deviation from a perfectly accurate reading. You might want to think carefully about this since we often find that what is most important for many applications is actually repeatability.
- Temperature range – for example, -40 + 85Celsius
- Electrical supply – for example, 5V, 12V or 24V
- Electrical output – for example RS232, A/B pulses, 0-10V, 4-20mA
- Special requirements – such as – “we want to keep power consumption as low as possible” or “it’s for submersion in hot sulphuric acid” or “we’re using a capacitive device and we have reliability problems”
- Quantity – for example, “100/year”
Simple Integration and Installation
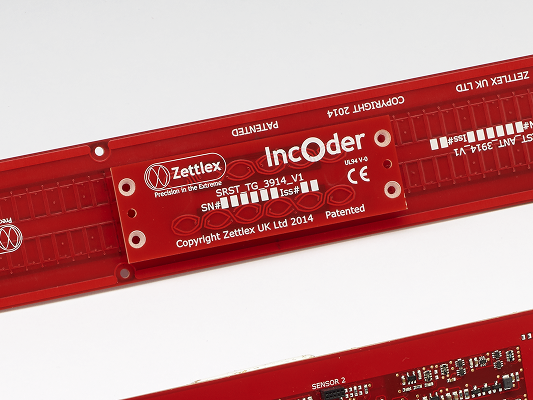
Shaft IncOder inductive angle encoders incorporate integral bearings, eliminating the need for precise alignment between sensing elements. With multiple shaft and hub‑shaft rotor interface options, Shaft IncOder units can be configured to suit a wide range of coupling arrangements.
A variety of interface choices further simplifies system integration. Shaft IncOder can be supplied with numerous cable and connector configurations, offered in axial, vertical, or radial orientations. Communication options include BiSS‑C, SSI, SPI, Asynchronous Serial, and ABZ outputs, allowing flexibility across different control systems with resolution up to 20 bits.
Talk to an Application Engineer
Work directly with our technical team to optimize motion configuration, system integration, and control interfaces.