














force/Torque Sensors
Varo Series
A high-performance Force/Torque Sensor with digital electronics for scalable robotics
A high-performance Force/Torque Sensor purpose-built for humanoid limbs, mobile arms, and OEM robotic subsystems.
Precision Sensing Without Complexity
- Digital output maximizes resolution and accuracy without the need for external analog amplification.
- Standardized digital interface enables direct integration with modern robot controllers and embedded computing platforms.
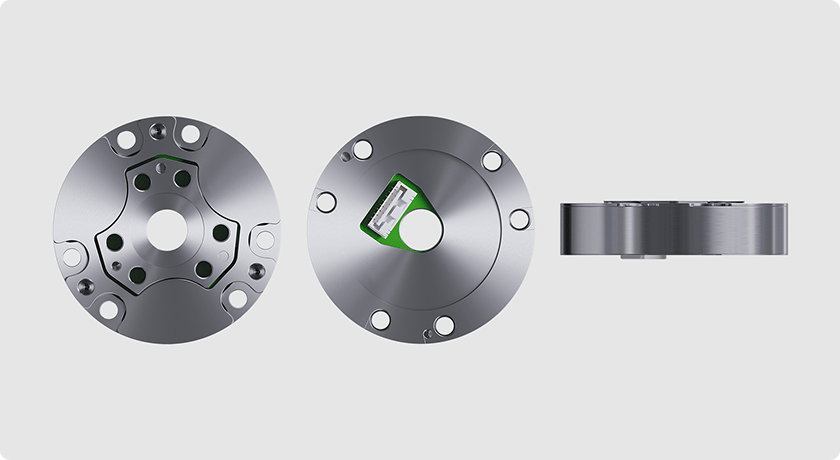
- Compact design optimized for mass and torque capacity for balance and dexterity in humanoid and mobile systems.
- Standard calibration and a unified electronics platform ensure consistency from prototype through full production
Production-Ready Performance
Designed for both performance and reliability, Varo is engineered for automated instrumentation, assembly, and calibration at scale.
Its compact 55 mm and 62 mm variants offer the ideal balance of rigidity, mass and sensitivity – bringing dependable six-axis feedback to humanoids, mobile manipulators, and the expanding field of intelligent automation.
Browse models

Varo55

Varo62
Diameter
55 mm
62mm
Height
13.1 mm
18.3 mm
Weight
0.115 kg
0.22 kg
Rated Fx,Fy
±1200 N
±3000 N
Rated Fz
±2400 N
±6000 N
Rated Tx.Ty
±40 N
±120 N

Talk to an Application Engineer
Work directly with our technical team to optimize sensor integration, calibration, and interface design for your OEM system