












sERVO DRIVES
Everest
The most power-dense servo drive. Ever.
Everest is the epitome of motion control expertise, the most power-dense servo drives on the market, capable of delivering the highest performance.
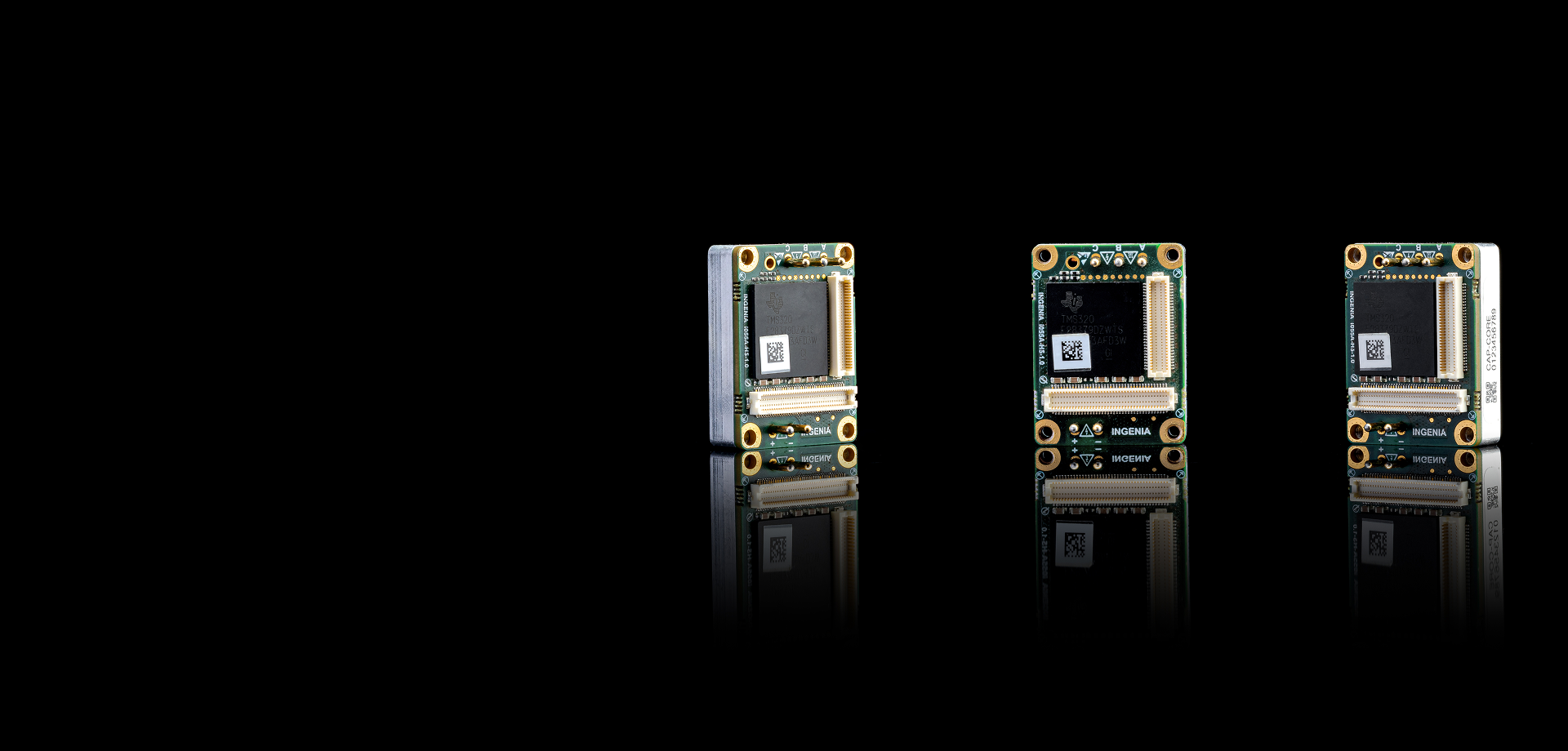
Peak engineering in the slimmest package
With a slimmer profile than its predecessor, Everest redefines flexibility in motion control. Its ultra-compact form factor allows it to fit seamlessly into the tightest applications, without sacrificing the performance and best-in-class efficiency that engineers expect. Plug it or wire it, Everest offers flexible configurations, making it the perfect solution for any application, from advanced robotics and industrial automation to medical devices and beyond.
One size fits all your needs
EtherCAT and CANopen versions available with a bus latency down to 1 cycle, outpacing any of its market competitors.
A high speed SPI bus communication is also available for optimized EtherCAT/CANopen multi-axis architectures.
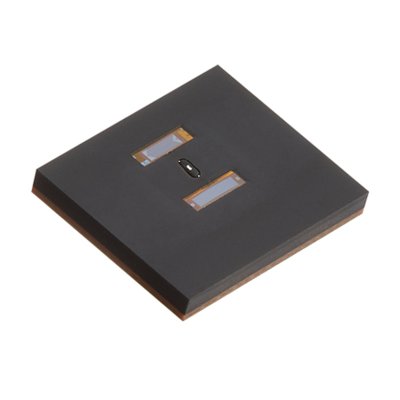
Everest S is able to provide a current loop running at 50 kHz and velocity/position loop at 25 kHz, guaranteeing optimal performance for your motors.
Combined with a 16 bit differential current sensor and 3 configurable ranges, Everest S delivers flawless resolution.
Overview
Features & Benefits
- Highest power density
- 45 A continuous / 60 A peak
- Up to 100 kHZ PWM frequency
- Up to 99% efficiency
- Standby power consumption down to 1 W
- EtherCAT embedded communications + CANopen
- STO inputs are integrated, rated to SIL-3 PLe
Specifications
| Specification | Everest CORE | Everest NET | Everest XCR |
|---|---|---|---|
| Part number | EVE-CORE | EVS-NET | EVS-XCR |
| Rated/Peak current | 45 A (60 A peak) | 45 A (60 A peak) | 45 A (60 A peak) |
| Voltage | 80 VDC | 80 VDC | 80 VDC |
| Size | 34.5 x 26 x 10.4 mm | 34.5 x 26 x 10.3 mm | 42 × 29 x 23.2 mm |
| Efficiency | Up to 99% | Up to 99% | Up to 99% |
| Minimum Standby Power Consumption | 1 W | 1 W | 2.4 W – 3.2 W |
| Communications | SPI | EtherCAT / CANopen | EtherCAT / CANopen |
| Safety | STO (SIL3 Ple) | STO (SIL3 Ple) | STO (SIL3 Ple) |