












safety certified sERVO DRIVES
Denali Safe
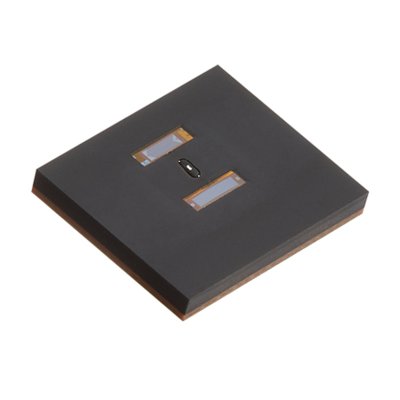
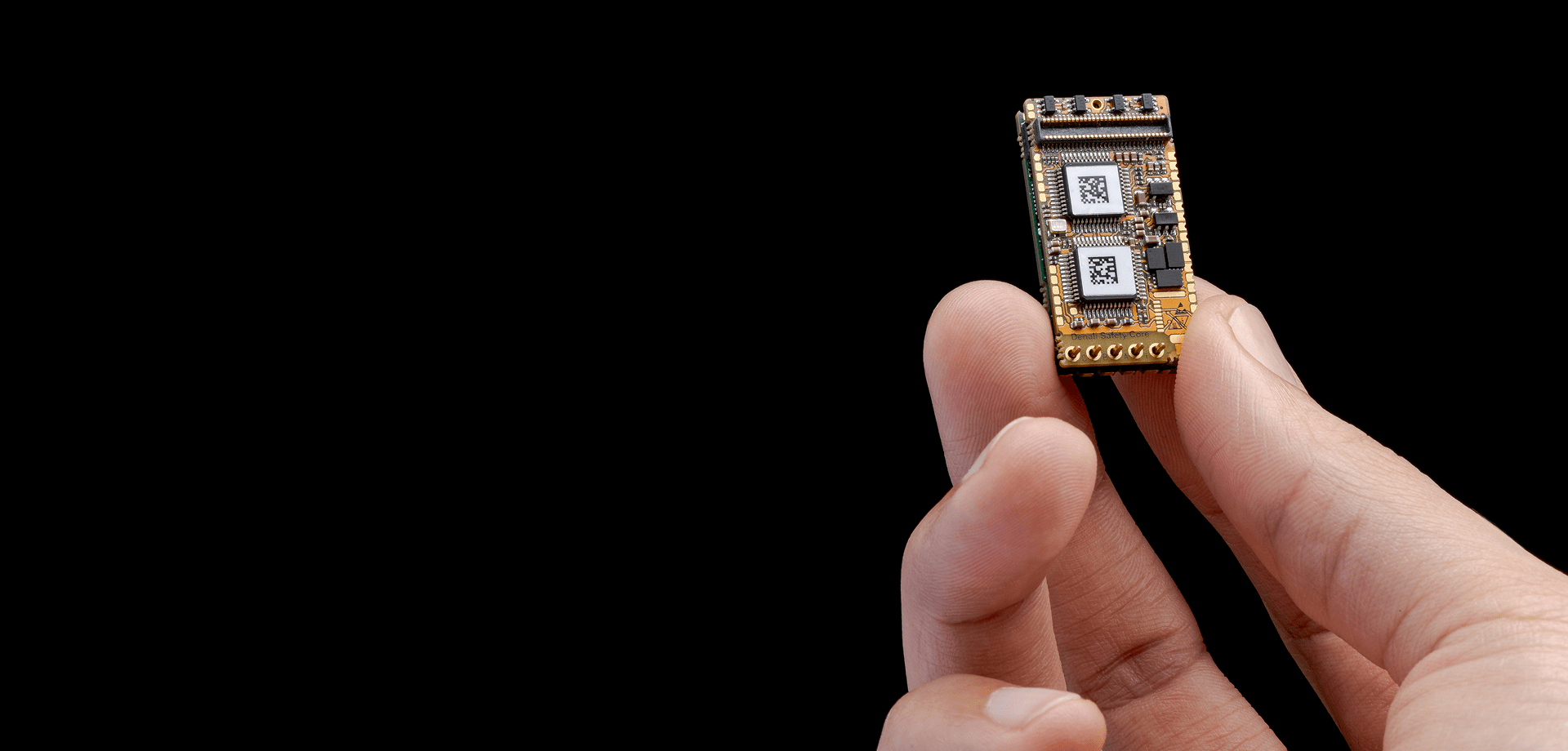
The smallest servo drive ever, now FSoE Certified.
Safety has never been this small.
The features you fell in love with…
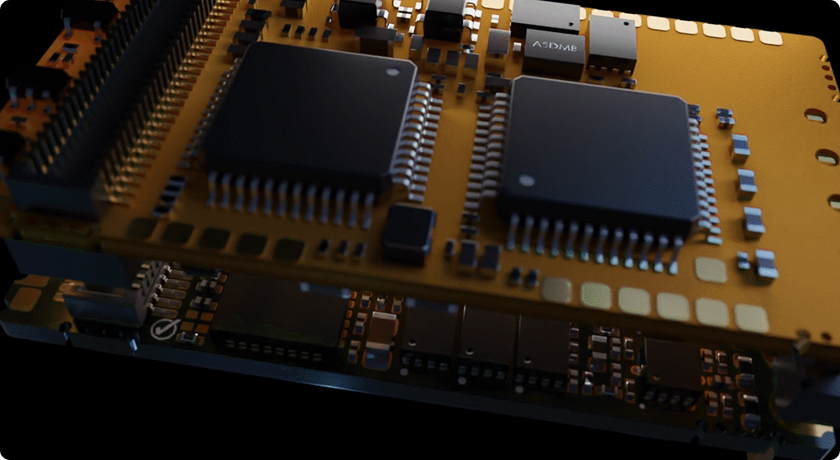
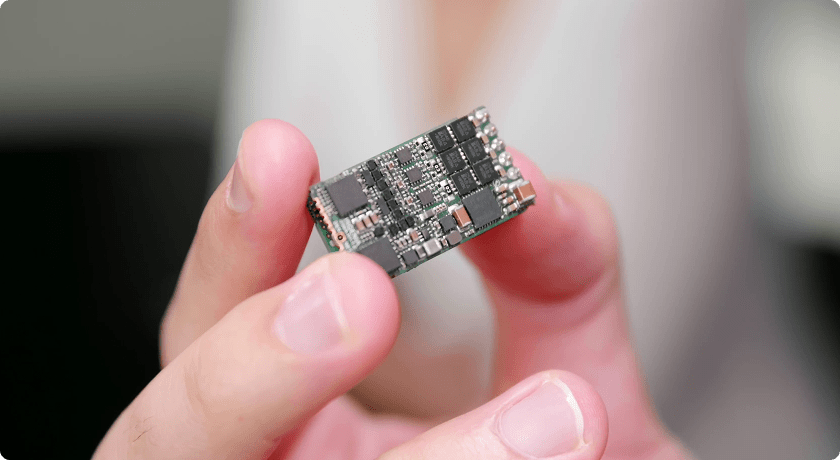
The Denali Series is one of Novanta’s flagship servo drives, part of the Summit Collection. It’s compact design and best-in-class performance make it one of the most advanced servo drives on the market. Specifically designed for applications where space comes at a premium and maximum performance is a must, Denali has become a household name in the industry.
… and the ones that will rekindle the spark.
Built on top of the standard Denali servo drive, our Safety Certified version has reached new heights in the servo drive space. Improving Denali has been an exciting yet difficult challenge – improving such an advanced piece of technology requires a sum of research, development and coordination. Novanta has not only achieved this, but built on the existing platform advanced safety functions over EtherCAT, without compromising any specs or performance.
Overview
Features & Benefits
- Advanced functional safety functions
- 5 A continuous / 10 A peak
- Up to 200 kHZ PWM frequency
- Up to 99% efficiency
- Standby power consumption down to 1.4 W
- EtherCAT embedded communications
- FSoE (Functional Safety over EtherCAT) rated up to SIL-3 PLe
| Specification | Value |
|---|---|
| Part number | DEN-S-NET |
| Rated/Peak current | 5 A (10 A peak) |
| Voltage | 48 VDC |
| Size | 33 x 17.96 x 9.5 mm |
| Efficiency | Up to 99% |
| Minimum Standby Power Consumption | 1.4 W |
| Feedback sensors (motion control) | Supports Digital Halls, Quadrature Incremental encoder, Absolute BiSS-C encoder, SSI |
| Communications | FSoE (FailSafe over EtherCAT) |
| Safety Feedback Combinations | 2x BiSS-C BP3; 1x BiSS-C BP3 + QEI; 1x BiSS-C BP3 + Halls; QEI + Halls |
| Safety | FSoE, STO, SS1-r, SS2-t, SS2-r, SOS, SLS, SSR, SLP, SLI, SDI, SV, SSM (SIL3 PLd CAT3) |
Denali Safe NET
Related Articles
Product Related
Servo drive disambiguation for daring engineers.
Servo drive disambiguation for daring engineers.
Servo drive disambiguation for daring engineers.
Servo drive disambiguation for daring engineers.
Servo drive disambiguation for daring engineers.
Servo drive disambiguation for daring engineers.
Servo drive disambiguation for daring engineers.
Servo drive disambiguation for daring engineers.
General Knowledge
Servo drive disambiguation for daring engineers.
Servo drive disambiguation for daring engineers.
Servo drive disambiguation for daring engineers.
Servo drive disambiguation for daring engineers.
General
The motor constant (Km) of a motor is a ratio of the motor’s torque and the square root of the power dissipated. It is a numerical description of how well a motor can convert electrical energy into useful torque rather than resistive heat. It is a useful way to compare two motors. A motor with a higher Km will be able to output the same torque while staying cooler than an otherwise equivalent motor with a lower Km. Km should be an important consideration for any application that has thermal or efficiency limitations. Learn more about why Km matters for thermally limited applications here.
It is recommended that a motor be selected before the drive so that you can ensure the motor performance as stated on the datasheet. If you select a drive first, you may not have enough current as specified on the motor datasheet to meet the continuous torque requirement. As an example, say you selected a drive that supplies 6A of current. Then you select the Omni motor OPN060013A , with a continuous torque of 0.52Nm, which meets your system requirements. However, you later notice that that motor has a continuous current rating of 17A. This means that the continuous torque value of 0.52Nm was rated at 17A. If you only have 6A to supply to the motor, the continuous torque output will drop significantly. See the continuous torque calculation with limited current below. Continuous Torque = Kt*Continuous Current 0.52 = 0.03 * 17 X = 0.03 * 6 X = 0.18 Nm Omni motor and Ingenia servo drive compatibility chart.
Please contact an Applications Engineer for torque-speed performance curves. For performance, electrical, and mechanical specifications, please see our datasheets located on each frameless motor product page.
General Technology
Key factors you may want to consider when choosing what linear position sensor you want to purchase include, the required measurement range, measurement accuracy, response time, and environmental conditions. For further information, read our guide on choosing the right sensor.
Novanta is not just an encoder company; we have the complete motion stack; servo drives, motors, and complete encoder systems! We offer scales and hubs with Aura P for standard and custom sizes. To further improve your manufacturing productivity, scales can be pre-mounted on hubs, so they’re ready for integration out of the box. Please consult the Ordering Information section of the datasheet for our offerings, and we encourage you to contact Celera Motion Technical Support for custom requests.
Yes, it is possible to mount the rotor to a metal housing with a plastic buffer. The buffer would need to be at least 3 mm thick to ensure the metal is sufficiently far away from the rotor so as to not adversely impact the sensor performance. An example would be to use a machined plastic shim or 3mm nylon spacers.
Please contact our Applications Engineering team for more guidance.
IncOder Specific
SSI, BiSS-C, SPI and ASI (Asynchronous Serial Outputs). A complete list of protocol options can be found in the datasheet.
IncOder CORE can be purchased by specifying your sensor part number with CORE-X-XXX… on your Purchase Order. IncOder CORE can be purchased through our online configurator here.
The IncOder CORE feedback sensor should be considered where the need for an inductive encoder solution with significantly reduced weight is important, particularly in low inertia, low energy applications e.g. camera gimbals, robotic joints, and rotary actuators. Additionally, IncOder CORE is more economically priced compared with IncOder, for medical and industrial OEM solutions focussed on scalability. IncOder CORE is suited for motion systems do not necessarily require the extreme environmental performance of IncOder however want to take advantage of its high reliability and robustness, immunity to dust and dirt, high resolution measurement output and easy-to-install capabilities.
Light Industrial Precision Machining
Yes, the M321/M328 spindle is specifically designed to have replaceable collets without the need to rebalance the shaft. Click for more information on the Light Industrial Series spindles.
Various collet sizes are available for the M321/M328, from 3mm, 1/8″, 4mm to a maximum of 6mm shank diameter, both for the manual and automatic collet versions. Additional specifications.
For normal machining applications, the minimum recommended speed for the M321 and M328 Light Industrial Series spindles are 10,000 rpm, although for soft materials such as perspex, lower speeds may be possible. More information on the Light Industrial Series spindles.
PCB Drilling and Routing
Most of our modern PCB Drilling & Routing spindles are fitted with a bonded collet, which cannot be removed by the customer. In this case, the spindle should be sent to Celera Motion’s Westwind authorized repair center to have a new collet fitted. However, some products are still fitted with a removable collet, and in this case, the customer should contact the closest Air Bearing Spindles Center of Excellence found in the Contact section of our website, to discuss which part to order.
Supply pressure for the cooling water of a PCB Drilling & Routing Series spindle should be 3 to 4 bar (43.5 – 58 psi). Specifications for the PCB Drilling & Routing Series can be found here.
Air pressure used for a PCB Drilling & Routing Series spindle should be 5 to 6 bar (72.5 to 87 psi). More information on the PCB Drilling & Routing Series.
Product Specific
The Aura P utilizes optical reflective technology to read position. This platform tends to be more susceptible to contamination, so having clean optics is vital to encoder function. After installation, please follow the cleaning procedure outlined here.
Scale eccentricity and bearing runout have dramatic effects on accuracy. For example, an eccentricity of 0.1mm will result in a significant angular error of 0.44°. Minimizing eccentricity can be difficult; the scale alignment process is time-consuming, and averaging out the error with two readheads may not be possible where space and resources are limited. That’s why we made Aura P with built-in eccentricity compensation that can be performed within our SmartPrecision III software.
Yes, you can cut Aura P glass scales to shorter lengths. However, when doing so, you have to take some precautions. On both ends of the scale is a buffer zone. These zones limit the Aura P from optically traveling off of the grating patterns. If the buffer zones are altered by shortening the scale, Aura P may report an incorrect position at either end of the scale. Therefore, before making any cuts, ensure that there is an adequate measuring distance that includes buffer zones on both ends of the axis of motion. The mechanical alignment can be referenced in the Installation section of the datasheet. The encoder optics should always be at least 2.4576 mm from the scale edge. This value accounts for 0.02 mm of potential glass edge chips and defects resulting from the cutting process.
Rotary Atomizer Spindles
Yes, lightweight materials are used in rotary atomizer spindles. Many of our atomizers are designed to be fitted to robotic arms or linear movers, therefore the atomizer weight is extremely important. Click here for additional information on coating atomizer spindles.
Most of our atomizers are designed to be fitted with some form of external speed sensor to monitor shaft speed. These sensors can be activated optically, by black/white stripes on the turbine wheel, or magnetically, by magnets embedded in the side of the turbine wheel. It is the responsibility of the OEM to supply and fit the appropriate sensors and circuitry. Click here for additional information on our coating atomizer spindles.
All of Celera Motion’s Westwind atomizers are designed to operate without the need for water cooling. These coating atomizers rely on turbine exhaust air and paint flow through the shaft to remove any heat generated within the bearing assembly. Click for more information on our coating atomizer spindles.
Downloads
Choose Your Drive
Denali Safe

Sample Price (1-9 units)